|
PlayRho
2.0.0
An interactive physics engine & library.
|


|
|
PlayRho
2.0.0
An interactive physics engine & library.
|
|
Distance Proxy. More...
#include <playrho/d2/DistanceProxy.hpp>
Public Types | |
| using | ConstNormalIterator = ConstNormalPointer |
| Constant normal iterator. | |
| using | ConstNormalPointer = const UnitVec * |
| Constant normal pointer. | |
| using | ConstVertexIterator = ConstVertexPointer |
| Constant vertex iterator. | |
| using | ConstVertexPointer = const Length2 * |
| Constant vertex pointer. | |
Public Member Functions | |
| DistanceProxy ()=default | |
| Default constructor. | |
| DistanceProxy (const DistanceProxy ©) noexcept | |
| Copy constructor. More... | |
| DistanceProxy (const NonNegative< Length > &vertexRadius, const VertexCounter count, const Length2 *vertices, const UnitVec *normals) noexcept | |
| Initializing constructor. More... | |
| auto | GetNormal (VertexCounter index) const noexcept |
| Gets the normal for the given index. More... | |
| Span< const UnitVec > | GetNormals () const noexcept |
| Gets the normals. | |
| auto | GetVertex (VertexCounter index) const noexcept |
| Gets a vertex by index. More... | |
| auto | GetVertexCount () const noexcept |
| Gets the vertex count. More... | |
| auto | GetVertexRadius () const noexcept |
| Gets the vertex radius of the vertices of the associated shape. More... | |
| Span< const Length2 > | GetVertices () const noexcept |
| Gets the vertices. | |
Related Functions | |
(Note that these are not member functions.) | |
| AABB | ComputeAABB (const DistanceProxy &proxy, const Transformation &xf) noexcept |
| Computes the AABB. More... | |
| AABB | ComputeAABB (const DistanceProxy &proxy, const Transformation &xfm0, const Transformation &xfm1) noexcept |
| Computes the AABB. More... | |
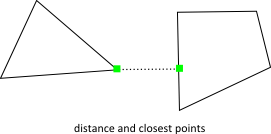
| DistanceOutput | Distance (const DistanceProxy &proxyA, const Transformation &transformA, const DistanceProxy &proxyB, const Transformation &transformB, DistanceConf conf=DistanceConf{}) |
| Determines the closest points between two shapes using an iterative method. More... | |
| SeparationInfo | GetMaxSeparation (const DistanceProxy &proxy1, const DistanceProxy &proxy2, Length stop=MaxFloat *Meter) |
| Gets the max separation information. More... | |
| SeparationInfo | GetMaxSeparation (const DistanceProxy &proxy1, const Transformation &xf1, const DistanceProxy &proxy2, const Transformation &xf2) |
| Gets the max separation information. More... | |
| SeparationInfo | GetMaxSeparation (const DistanceProxy &proxy1, const Transformation &xf1, const DistanceProxy &proxy2, const Transformation &xf2, Length stop) |
| Gets the max separation information. More... | |
| SeparationInfo | GetMaxSeparation4x4 (const DistanceProxy &proxy1, const Transformation &xf1, const DistanceProxy &proxy2, const Transformation &xf2) |
| Gets the max separation information for the first four vertices of the two given shapes. More... | |
| template<class T > | |
| VertexCounter | GetSupportIndex (const DistanceProxy &proxy, T dir) noexcept |
| Gets the supporting vertex index in given direction for given distance proxy. More... | |
| auto | GetVertexRadius (const DistanceProxy &arg) noexcept |
| Gets the vertex radius property of a given distance proxy. | |
| bool | operator!= (const DistanceProxy &lhs, const DistanceProxy &rhs) noexcept |
| Determines with the two given distance proxies are not equal. | |
| bool | operator== (const DistanceProxy &lhs, const DistanceProxy &rhs) noexcept |
| Determines with the two given distance proxies are equal. | |
| RayCastOutput | RayCast (const DistanceProxy &proxy, const RayCastInput &input, const Transformation &transform) noexcept |
| Cast a ray against the distance proxy. More... | |
| Area | TestOverlap (const DistanceProxy &proxyA, const Transformation &xfA, const DistanceProxy &proxyB, const Transformation &xfB, DistanceConf conf=DistanceConf{}) |
| Determine if two generic shapes overlap. More... | |
| bool | TestPoint (const DistanceProxy &proxy, const Length2 &point) noexcept |
| Tests a point for containment in the given distance proxy. More... | |
Distance Proxy.
A distance proxy aggregates a convex set of vertices, their normals, and a vertex radius of those vertices. This can be visualized as a convex N-sided polygon with rounded corners. It's meant to represent any single portion of a shape identified by its child-index.
DistanceProxy does not outlive the pointed-to vertices or normals!
|
inlinenoexcept |
Copy constructor.
DistanceProxy does not outlive the copied from DistanceProxy.
|
inlinenoexcept |
Initializing constructor.
Constructs a distance proxy for n-point shape (like a polygon).
| vertexRadius | Radius of the given vertices. |
| count | Count of elements of the vertices and normals arrays. |
| vertices | Pointer to array of vertices of shape (relative to shape's origin). |
| normals | Pointer to array of normals of the shape. |
MaxShapeVertices elements. DistanceProxy does not outlive the pointed-to vertices or normals! MaxShapeVertices elements.
|
inlinenoexcept |
Gets the normal for the given index.
index is less than GetVertexCount(). Referenced by playrho::d2::GetManifold(), GetMaxSeparation(), and GetMaxSeparation4x4().
|
inlinenoexcept |
Gets a vertex by index.
| index | Index value less than count of vertices represented by this proxy. |
index is less than GetVertexCount(). Referenced by playrho::d2::Manifold::CollideShapes(), playrho::d2::GetManifold(), GetMaxSeparation(), GetMaxSeparation4x4(), and playrho::d2::GetSeparationScenario().
|
inlinenoexcept |
Gets the vertex count.
This is the count of valid vertex elements that this object provides.
MaxShapeVertices. Referenced by playrho::d2::Manifold::CollideShapes(), Distance(), playrho::d2::GetManifold(), GetMaxSeparation(), playrho::d2::GetSeparationScenario(), and playrho::d2::Shape::GetVertexCount().
|
inlinenoexcept |
Gets the vertex radius of the vertices of the associated shape.
Referenced by playrho::d2::Manifold::CollideShapes(), playrho::d2::GetManifold(), and TestOverlap().
|
related |
Computes the AABB.
Computes the Axis Aligned Bounding Box (AABB) for the given child shape at a given a transform.
| proxy | Distance proxy for the child shape. |
| xf | World transform of the shape. |
xf is valid.
|
related |
Computes the AABB.
Computes the Axis Aligned Bounding Box (AABB) for the given child shape at the given transforms.
| proxy | Distance proxy for the child shape. |
| xfm0 | World transform 0 of the shape. |
| xfm1 | World transform 1 of the shape. |
xfm0 and xfm1 are both valid.
|
related |
Determines the closest points between two shapes using an iterative method.
size(conf.cache.indices) should be zero. | proxyA | Proxy A. |
| transformA | Transform of A. |
| proxyB | Proxy B. |
| transformB | Transform of B. |
| conf | Configuration to use including the simplex cache for assisting the determination. |
DefaultMaxDistanceIters is zero.
|
related |
Gets the max separation information.
proxy1, index of the vertex from proxy2 (that had the maximum separation distance from each other in the direction of that normal), and the maximal distance.
|
related |
Gets the max separation information.
GetMaxSeparation function that takes a stopping length - when it's already known that the two convex shapes' AABBs overlap. proxy1, index of the vertex from proxy2 (that had the maximum separation distance from each other in the direction of that normal), and the maximal distance.Referenced by playrho::d2::Manifold::CollideShapes().
|
related |
Gets the max separation information.
proxy1, index of the vertex from proxy2 (that had the maximum separation distance from each other in the direction of that normal), and the maximal distance.
|
related |
Gets the max separation information for the first four vertices of the two given shapes.
This is a version of the get-max-separation functions that is optimized for two quadrilateral (4-sided) polygons.
proxy1, index of the vertex from proxy2 (that had the maximum separation distance from each other in the direction of that normal), and the maximal distance.Referenced by playrho::d2::Manifold::CollideShapes().
|
related |
Gets the supporting vertex index in given direction for given distance proxy.
This finds the vertex that's most significantly in direction of the given vector and returns its index.
| proxy | Distance proxy object to find index in if a valid index exists for it. |
| dir | Direction vector to find index for. |
InvalidVertex if d is invalid or the count of vertices is zero, otherwise a value from 0 to one less than count.
|
related |
Determine if two generic shapes overlap.
CollideShapes function. This is not always the case however especially when the separation or overlap distance is closer to zero.