|
PlayRho
2.0.0
An interactive physics engine & library.
|


|
|
PlayRho
2.0.0
An interactive physics engine & library.
|
|
Wheel joint definition. More...
#include <playrho/d2/WheelJointConf.hpp>
Public Types | |
| using | super = JointBuilder< WheelJointConf > |
| Super type. | |
 Public Types inherited from playrho::d2::JointBuilder< WheelJointConf > Public Types inherited from playrho::d2::JointBuilder< WheelJointConf > | |
| using | reference = value_type & |
| Reference type. | |
| using | value_type = WheelJointConf |
| Value type. | |
Public Member Functions | |
| constexpr | WheelJointConf () noexcept=default |
| Default constructor. | |
| WheelJointConf (BodyID bA, BodyID bB, const Length2 &laA=Length2{}, const Length2 &laB=Length2{}, const UnitVec &axis=UnitVec::GetRight()) noexcept | |
| constexpr auto & | UseDampingRatio (Real v) noexcept |
| Uses the given damping ratio value. | |
| constexpr auto & | UseEnableMotor (bool v) noexcept |
| Uses the given enable motor state value. | |
| constexpr auto & | UseFrequency (NonNegative< Frequency > v) noexcept |
| Uses the given frequency value. | |
| constexpr auto & | UseMaxMotorTorque (Torque v) noexcept |
| Uses the given max motor toque value. | |
| constexpr auto & | UseMotorSpeed (AngularVelocity v) noexcept |
| Uses the given motor speed value. | |
| Public Member Functions inherited from playrho::d2::JointBuilder< WheelJointConf > | |
| constexpr reference | UseBodyA (BodyID b) noexcept |
| Use value for body A setting. | |
| constexpr reference | UseBodyB (BodyID b) noexcept |
| Use value for body B setting. | |
| constexpr reference | UseCollideConnected (bool v) noexcept |
| Use value for collide connected setting. | |
Public Attributes | |
| AngularMomentum | angularImpulse = {} |
| Angular impulse. | |
| RotInertia | angularMass = RotInertia{} |
| Motor mass. | |
| UnitVec | ax |
| Solver A X directional. | |
| UnitVec | ay |
| Solver A Y directional. | |
| LinearVelocity | bias = 0_mps |
| Bias. | |
| Real | dampingRatio = DefaultDampingRatio |
| Suspension damping ratio, one indicates critical damping. | |
| bool | enableMotor = false |
| Enable/disable the joint motor. | |
| NonNegative< Frequency > | frequency = DefaultFrequency |
| Suspension frequency, zero indicates no suspension. | |
| InvMass | gamma = InvMass{} |
| Gamma. | |
| Momentum | impulse = 0_Ns |
| Impulse. | |
| Length2 | localAnchorA = Length2{} |
| The local anchor point relative to body A's origin. | |
| Length2 | localAnchorB = Length2{} |
| The local anchor point relative to body B's origin. | |
| UnitVec | localXAxisA = UnitVec::GetRight() |
| The local X translation axis in body-A. | |
| UnitVec | localYAxisA = GetRevPerpendicular(UnitVec::GetRight()) |
| The local Y translation axis in body-A. | |
| Mass | mass = 0_kg |
| Mass. | |
| Torque | maxMotorTorque = Torque{} |
| The maximum motor torque. | |
| AngularVelocity | motorSpeed = 0_rpm |
| The desired angular motor speed. | |
| Length | sAx = 0_m |
| Solver A x location. | |
| Length | sAy = 0_m |
| Solver A y location. | |
| Length | sBx = 0_m |
| Solver B x location. | |
| Length | sBy = 0_m |
| Solver B y location. | |
| Momentum | springImpulse = 0_Ns |
| Spring impulse. | |
| Mass | springMass = 0_kg |
| Spring mass. | |
| Public Attributes inherited from playrho::d2::JointConf | |
| BodyID | bodyA = InvalidBodyID |
| 1st attached body. | |
| BodyID | bodyB = InvalidBodyID |
| 2nd attached body. | |
| bool | collideConnected = false |
| Collide connected. More... | |
Static Public Attributes | |
| static constexpr auto | DefaultDampingRatio = Real(0.7f) |
| Default damping ratio. | |
| static constexpr auto | DefaultFrequency = NonNegative<Frequency>{2_Hz} |
| Default frequency. | |
Related Functions | |
(Note that these are not member functions.) | |
| constexpr Momentum2 | GetLinearReaction (const WheelJointConf &object) |
| Gets the current linear reaction for the given configuration. | |
| void | InitVelocity (WheelJointConf &object, const Span< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| Initializes velocity constraint data based on the given solver data. More... | |
| constexpr void | SetDampingRatio (WheelJointConf &object, Real value) noexcept |
| Free function for setting the damping ratio of the given configuration. | |
| constexpr void | SetFrequency (WheelJointConf &object, NonNegative< Frequency > value) noexcept |
| Free function for setting the frequency of the given configuration. | |
| constexpr void | SetMaxMotorTorque (WheelJointConf &object, Torque value) noexcept |
| Sets the maximum motor torque for the given configuration. | |
| constexpr auto | ShiftOrigin (WheelJointConf &, const Length2 &) |
| Shifts the origin notion of the given configuration. | |
| bool | SolvePosition (const WheelJointConf &object, const Span< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| Solves the position constraint. More... | |
| bool | SolveVelocity (WheelJointConf &object, const Span< BodyConstraint > &bodies, const StepConf &step) |
| Solves velocity constraint. More... | |
| Related Functions inherited from playrho::d2::JointConf | |
| void | Set (JointConf &def, const Joint &joint) noexcept |
| Sets the joint definition data for the given joint. | |
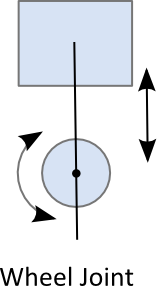
Wheel joint definition.
This joint provides two degrees of freedom: translation along an axis fixed in body A and rotation in the plane. In other words, it is a point to line constraint with a rotational motor and a linear spring/damper. This requires defining a line of motion using an axis and an anchor point. The definition uses local anchor points and a local axis so that the initial configuration can violate the constraint slightly. The joint translation is zero when the local anchor points coincide in world space. Using local anchors and a local axis helps when saving and loading a game.
|
noexcept |
Initialize the bodies, anchors, axis, and reference angle using the world anchor and world axis.
|
related |
Initializes velocity constraint data based on the given solver data.
SolveVelocity. | object | Configuration object. bodyA and bodyB must index bodies within the given bodies container or be the special body ID value of InvalidBodyID. |
| bodies | Container of body constraints. |
| step | Configuration for the step. |
| conf | Constraint solver configuration. |
| std::out_of_range | If the given object's bodyA or bodyB values are not InvalidBodyID and are not indices within range of the given bodies container. |
|
related |
Solves the position constraint.
| object | Configuration object. bodyA and bodyB must index bodies within the given bodies container or be the special body ID value of InvalidBodyID. |
| bodies | Container of body constraints. |
| conf | Constraint solver configuration. |
| std::out_of_range | If the given object's bodyA or bodyB values are not InvalidBodyID and are not indices within range of the given bodies container. |
true if the position errors are within tolerance.
|
related |
Solves velocity constraint.
InitVelocity has been called. | object | Configuration object. bodyA and bodyB must index bodies within the given bodies container or be the special body ID value of InvalidBodyID. |
| bodies | Container of body constraints. |
| step | Configuration for the step. |
| std::out_of_range | If the given object's bodyA or bodyB values are not InvalidBodyID and are not indices within range of the given bodies container. |
true if velocity is "solved", false otherwise.