|
| AABB | ComputeAABB (const DistanceProxy &proxy, const Transformation &xf) noexcept |
| | Computes the AABB. More...
|
| |
| AABB | ComputeAABB (const DistanceProxy &proxy, const Transformation &xfm0, const Transformation &xfm1) noexcept |
| | Computes the AABB. More...
|
| |
|
AABB | ComputeAABB (const Shape &shape, const Transformation &xf) noexcept |
| | Computes the AABB for the given shape with the given transformation.
|
| |
|
AABB | ComputeAABB (const World &world, FixtureID id) |
| | Computes the AABB for the identified fixture within the given world.
|
| |
|
AABB | ComputeAABB (const World &world, BodyID id) |
| | Computes the AABB for the identified body within the given world.
|
| |
| AABB | ComputeIntersectingAABB (const World &world, FixtureID fA, ChildCounter iA, FixtureID fB, ChildCounter iB) noexcept |
| | Computes the intersecting AABB for the given pair of fixtures and indexes. More...
|
| |
|
AABB | ComputeIntersectingAABB (const World &world, const Contact &contact) |
| | Computes the intersecting AABB for the given contact.
|
| |
|
AABB | GetAABB (const playrho::detail::RayCastInput< 2 > &input) noexcept |
| | Gets the AABB for the given ray cast input data. <2>
|
| |
| constexpr Length | GetPerimeter (const AABB &aabb) noexcept |
| | Gets the perimeter length of the 2-dimensional AABB. More...
|
| |
|
PointStates | GetPointStates (const Manifold &manifold1, const Manifold &manifold2) noexcept |
| | Computes the point states given two manifolds.
|
| |
| ClipList | ClipSegmentToLine (const ClipList &vIn, const UnitVec &normal, Length offset, ContactFeature::Index indexA) |
| | Clipping for contact manifolds. More...
|
| |
|
DistanceConf | GetDistanceConf (const ToiConf &conf) noexcept |
| | Gets the distance configuration for the given time of impact configuration.
|
| |
|
DistanceConf | GetDistanceConf (const StepConf &conf) noexcept |
| | Gets the distance configuration for the given step configuration.
|
| |
|
PairLength2 | GetWitnessPoints (const Simplex &simplex) noexcept |
| | Gets the witness points of the given simplex.
|
| |
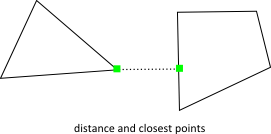
| DistanceOutput | Distance (const DistanceProxy &proxyA, const Transformation &transformA, const DistanceProxy &proxyB, const Transformation &transformB, DistanceConf conf=DistanceConf{}) |
| | Determines the closest points between two shapes. More...
|
| |
| Area | TestOverlap (const DistanceProxy &proxyA, const Transformation &xfA, const DistanceProxy &proxyB, const Transformation &xfB, DistanceConf conf=DistanceConf{}) |
| | Determine if two generic shapes overlap. More...
|
| |
|
constexpr Length2 | GetDelta (PairLength2 arg) noexcept |
| | Gets the delta to go from the first element to the second.
|
| |
|
bool | operator== (const DistanceProxy &lhs, const DistanceProxy &rhs) noexcept |
| | Determines with the two given distance proxies are equal.
|
| |
|
std::size_t | FindLowestRightMostVertex (Span< const Length2 > vertices) |
| | Finds the lowest right most vertex in the given collection.
|
| |
|
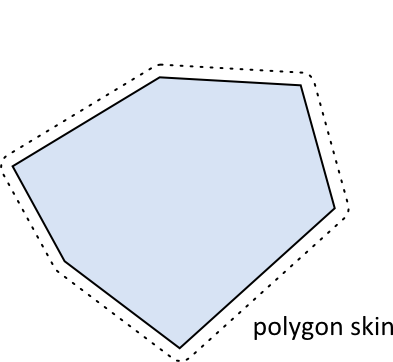
std::vector< Length2 > | GetConvexHullAsVector (Span< const Length2 > vertices) |
| | Gets the convex hull for the given collection of vertices as a vector.
|
| |
| bool | TestPoint (const DistanceProxy &proxy, Length2 point) noexcept |
| | Tests a point for containment in the given distance proxy. More...
|
| |
|
bool | operator!= (const DistanceProxy &lhs, const DistanceProxy &rhs) noexcept |
| | Determines with the two given distance proxies are not equal.
|
| |
|
NonNegative< Length > | GetVertexRadius (const DistanceProxy &arg) noexcept |
| | Gets the vertex radius property of a given distance proxy.
|
| |
| template<class T > |
| VertexCounter | GetSupportIndex (const DistanceProxy &proxy, T dir) noexcept |
| | Gets the supporting vertex index in the given direction for the given distance proxy. More...
|
| |
| void | swap (DynamicTree &lhs, DynamicTree &rhs) noexcept |
| |
| void | Query (const DynamicTree &tree, const AABB &aabb, const DynamicTreeSizeCB &callback) |
| | Query the given dynamic tree and find nodes overlapping the given AABB. More...
|
| |
| void | Query (const DynamicTree &tree, const AABB &aabb, QueryFixtureCallback callback) |
| | Queries the world for all fixtures that potentially overlap the provided AABB. More...
|
| |
| Length | ComputeTotalPerimeter (const DynamicTree &tree) noexcept |
| | Gets the sum of the perimeters of nodes. More...
|
| |
| Real | ComputePerimeterRatio (const DynamicTree &tree) noexcept |
| | Gets the ratio of the sum of the perimeters of nodes to the root perimeter. More...
|
| |
| DynamicTree::Height | ComputeHeight (const DynamicTree &tree, DynamicTree::Size index) noexcept |
| | Computes the height of the tree from a given node. More...
|
| |
| DynamicTree::Height | GetMaxImbalance (const DynamicTree &tree) noexcept |
| | Gets the maximum imbalance. More...
|
| |
| bool | ValidateStructure (const DynamicTree &tree, DynamicTree::Size index) noexcept |
| | Validates the structure of the given tree from the given index. More...
|
| |
| bool | ValidateMetrics (const DynamicTree &tree, DynamicTree::Size index) noexcept |
| | Validates the metrics of the given tree from the given index. More...
|
| |
|
constexpr bool | operator== (const DynamicTree::LeafData &lhs, const DynamicTree::LeafData &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const DynamicTree::LeafData &lhs, const DynamicTree::LeafData &rhs) noexcept |
| | Inequality operator.
|
| |
| constexpr bool | IsUnused (const DynamicTree::TreeNode &node) noexcept |
| | Is unused. More...
|
| |
| constexpr bool | IsLeaf (const DynamicTree::TreeNode &node) noexcept |
| | Is leaf. More...
|
| |
| constexpr bool | IsBranch (const DynamicTree::TreeNode &node) noexcept |
| | Is branch. More...
|
| |
|
constexpr DynamicTree::BranchData | ReplaceChild (DynamicTree::BranchData bd, DynamicTree::Size oldChild, DynamicTree::Size newChild) |
| | Replaces the old child with the new child.
|
| |
|
constexpr AABB | GetAABB (const DynamicTree::TreeNode &node) noexcept |
| | Gets the AABB of the given dynamic tree node.
|
| |
| constexpr DynamicTree::Size | GetNext (const DynamicTree::TreeNode &node) noexcept |
| | Gets the next index of the given node. More...
|
| |
| DynamicTree::Height | GetHeight (const DynamicTree &tree) noexcept |
| | Gets the height of the binary tree. More...
|
| |
| AABB | GetAABB (const DynamicTree &tree) noexcept |
| | Gets the AABB for the given dynamic tree. More...
|
| |
|
bool | TestOverlap (const DynamicTree &tree, DynamicTree::Size leafIdA, DynamicTree::Size leafIdB) noexcept |
| | Tests for overlap of the elements identified in the given dynamic tree.
|
| |
|
DynamicTree::Height | ComputeHeight (const DynamicTree &tree) noexcept |
| | Computes the height of the given dynamic tree.
|
| |
| std::size_t | size (const DynamicTree &tree) noexcept |
| | Gets the "size" of the given tree. More...
|
| |
|
Manifold::Conf | GetManifoldConf (const StepConf &conf) noexcept |
| | Gets the manifold configuration for the given step configuration.
|
| |
| Manifold | GetManifold (bool flipped, const DistanceProxy &shape0, const Transformation &xf0, const VertexCounter idx0, const DistanceProxy &shape1, const Transformation &xf1, const VertexCounter2 indices1, const Manifold::Conf conf) |
| | Gets a face-to-face based manifold. More...
|
| |
| Manifold | GetManifold (bool flipped, Length totalRadius, const DistanceProxy &shape, const Transformation &sxf, Length2 point, const Transformation &xfm) |
| | Computes manifolds for face-to-point collision. More...
|
| |
|
Manifold | GetManifold (Length2 locationA, const Transformation &xfA, Length2 locationB, const Transformation &xfB, Length totalRadius) noexcept |
| | Gets a point-to-point based manifold.
|
| |
| Manifold | CollideShapes (const DistanceProxy &shapeA, const Transformation &xfA, const DistanceProxy &shapeB, const Transformation &xfB, Manifold::Conf conf=GetDefaultManifoldConf()) |
| | Calculates the relevant collision manifold. More...
|
| |
|
const char * | GetName (Manifold::Type type) noexcept |
| | Gets a unique name for the given manifold type.
|
| |
|
bool | operator== (const Manifold::Point &lhs, const Manifold::Point &rhs) noexcept |
| | Determines whether the two given manifold points are equal.
|
| |
|
bool | operator!= (const Manifold::Point &lhs, const Manifold::Point &rhs) noexcept |
| | Determines whether the two given manifold points are not equal.
|
| |
| bool | operator== (const Manifold &lhs, const Manifold &rhs) noexcept |
| | Manifold equality operator. More...
|
| |
| bool | operator!= (const Manifold &lhs, const Manifold &rhs) noexcept |
| | Manifold inequality operator. More...
|
| |
|
constexpr Manifold::Conf | GetDefaultManifoldConf () noexcept |
| | Gets the default manifold configuration.
|
| |
| MassData | GetMassData (Length r, NonNegative< AreaDensity > density, Length2 location) |
| | Computes the mass data for a circular shape. More...
|
| |
| MassData | GetMassData (Length r, NonNegative< AreaDensity > density, Length2 v0, Length2 v1) |
| | Computes the mass data for a linear shape. More...
|
| |
|
MassData | GetMassData (Length vertexRadius, NonNegative< AreaDensity > density, Span< const Length2 > vertices) |
| | Gets the mass data for the given collection of vertices with the given properties.
|
| |
| RayCastOutput | RayCast (Length radius, Length2 location, const RayCastInput &input) noexcept |
| | Cast a ray against a circle of a given radius at the given location. More...
|
| |
| RayCastOutput | RayCast (const ::playrho::detail::AABB< 2 > &aabb, const RayCastInput &input) noexcept |
| | Cast a ray against the given AABB. More...
|
| |
| RayCastOutput | RayCast (const DistanceProxy &proxy, const RayCastInput &input, const Transformation &transform) noexcept |
| | Cast a ray against the distance proxy. More...
|
| |
| RayCastOutput | RayCast (const Shape &shape, ChildCounter childIndex, const RayCastInput &input, const Transformation &transform) noexcept |
| | Cast a ray against the child of the given shape. More...
|
| |
| bool | RayCast (const DynamicTree &tree, RayCastInput input, const DynamicTreeRayCastCB &callback) |
| | Cast rays against the leafs in the given tree. More...
|
| |
| bool | RayCast (const World &world, const RayCastInput &input, const FixtureRayCastCB &callback) |
| | Ray-cast the world for all fixtures in the path of the ray. More...
|
| |
| SeparationScenario | GetSeparationScenario (IndexPair3 indices, const DistanceProxy &proxyA, const Transformation &xfA, const DistanceProxy &proxyB, const Transformation &xfB) |
| | Gets a separation finder for the given inputs. More...
|
| |
| LengthIndexPair | FindMinSeparation (const SeparationScenario &scenario, const Transformation &xfA, const Transformation &xfB) |
| | Finds the minimum separation. More...
|
| |
| Length | Evaluate (const SeparationScenario &scenario, const Transformation &xfA, const Transformation &xfB, IndexPair indexPair) |
| | Evaluates the separation of the identified proxy vertices at the given time factor. More...
|
| |
|
ChainShapeConf | GetChainShapeConf (Length2 dimensions) |
| | Gets an enclosing chain shape configuration for an axis aligned rectangle of the given dimensions (width and height).
|
| |
|
ChainShapeConf | GetChainShapeConf (const AABB &arg) |
| | Gets an enclosing chain shape configuration for the given axis aligned box.
|
| |
|
ChildCounter | GetChildCount (const ChainShapeConf &arg) noexcept |
| | Gets the child count for a given chain shape configuration.
|
| |
|
DistanceProxy | GetChild (const ChainShapeConf &arg, ChildCounter index) |
| | Gets the "child" shape for a given chain shape configuration.
|
| |
|
MassData | GetMassData (const ChainShapeConf &arg) noexcept |
| | Gets the mass data for a given chain shape configuration.
|
| |
|
bool | IsLooped (const ChainShapeConf &shape) noexcept |
| | Determines whether the given shape is looped.
|
| |
|
ChildCounter | GetNextIndex (const ChainShapeConf &shape, ChildCounter index) noexcept |
| | Gets the next index after the given index for the given shape.
|
| |
|
NonNegative< Length > | GetVertexRadius (const ChainShapeConf &arg) |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
NonNegative< Length > | GetVertexRadius (const ChainShapeConf &arg, ChildCounter) |
| | Gets the vertex radius of the given shape configuration.
|
| |
| void | Transform (ChainShapeConf &arg, const Mat22 &m) noexcept |
| | Transforms the given chain shape configuration's vertices by the given transformation matrix. More...
|
| |
|
ChainShapeConf | GetChainShapeConf (Length dimension) |
| | Gets an enclosing chain shape configuration for an axis aligned square of the given dimension.
|
| |
|
bool | operator== (const DiskShapeConf &lhs, const DiskShapeConf &rhs) noexcept |
| | Equality operator.
|
| |
|
bool | operator!= (const DiskShapeConf &lhs, const DiskShapeConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr ChildCounter | GetChildCount (const DiskShapeConf &) noexcept |
| | Gets the "child" count of the given disk shape configuration.
|
| |
|
DistanceProxy | GetChild (const DiskShapeConf &arg, ChildCounter index) |
| | Gets the "child" of the given disk shape configuration.
|
| |
|
constexpr NonNegative< Length > | GetVertexRadius (const DiskShapeConf &arg) noexcept |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
constexpr NonNegative< Length > | GetVertexRadius (const DiskShapeConf &arg, ChildCounter) noexcept |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
MassData | GetMassData (const DiskShapeConf &arg) noexcept |
| | Gets the mass data of the given disk shape configuration.
|
| |
| void | Transform (DiskShapeConf &arg, const Mat22 &m) noexcept |
| | Transforms the given shape configuration's vertices by the given transformation matrix. More...
|
| |
|
bool | operator== (const EdgeShapeConf &lhs, const EdgeShapeConf &rhs) noexcept |
| | Equality operator.
|
| |
|
bool | operator!= (const EdgeShapeConf &lhs, const EdgeShapeConf &rhs) noexcept |
| | Inequality operator.
|
| |
| constexpr ChildCounter | GetChildCount (const EdgeShapeConf &) noexcept |
| | Gets the "child" count for the given shape configuration. More...
|
| |
|
DistanceProxy | GetChild (const EdgeShapeConf &arg, ChildCounter index) |
| | Gets the "child" shape for the given shape configuration.
|
| |
|
NonNegative< Length > | GetVertexRadius (const EdgeShapeConf &arg) noexcept |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
NonNegative< Length > | GetVertexRadius (const EdgeShapeConf &arg, ChildCounter) noexcept |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
MassData | GetMassData (const EdgeShapeConf &arg) noexcept |
| | Gets the mass data for the given shape configuration.
|
| |
| void | Transform (EdgeShapeConf &arg, const Mat22 &m) noexcept |
| | Transforms the given shape configuration's vertices by the given transformation matrix. More...
|
| |
| MassData | GetMassData (const MultiShapeConf &arg) noexcept |
| | Computes the mass properties of this shape using its dimensions and density. The inertia tensor is computed about the local origin. More...
|
| |
|
bool | operator== (const MultiShapeConf &lhs, const MultiShapeConf &rhs) noexcept |
| | Equality operator.
|
| |
|
bool | operator!= (const MultiShapeConf &lhs, const MultiShapeConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
ChildCounter | GetChildCount (const MultiShapeConf &arg) noexcept |
| | Gets the "child" count for the given shape configuration.
|
| |
|
DistanceProxy | GetChild (const MultiShapeConf &arg, ChildCounter index) |
| | Gets the "child" shape for the given shape configuration.
|
| |
|
NonNegative< Length > | GetVertexRadius (const MultiShapeConf &arg, ChildCounter index) |
| | Gets the vertex radius of the given shape configuration.
|
| |
| void | Transform (MultiShapeConf &arg, const Mat22 &m) noexcept |
| | Transforms the given multi shape configuration by the given transformation matrix. More...
|
| |
| Length2 | GetEdge (const PolygonShapeConf &shape, VertexCounter index) |
| | Gets the identified edge of the given polygon shape. More...
|
| |
| bool | Validate (const Span< const Length2 > verts) |
| | Validates the convexity of the given collection of vertices. More...
|
| |
| constexpr ChildCounter | GetChildCount (const PolygonShapeConf &) noexcept |
| | Gets the "child" count for the given shape configuration. More...
|
| |
|
DistanceProxy | GetChild (const PolygonShapeConf &arg, ChildCounter index) |
| | Gets the "child" shape for the given shape configuration.
|
| |
|
NonNegative< Length > | GetVertexRadius (const PolygonShapeConf &arg) noexcept |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
NonNegative< Length > | GetVertexRadius (const PolygonShapeConf &arg, ChildCounter) noexcept |
| | Gets the vertex radius of the given shape configuration.
|
| |
|
MassData | GetMassData (const PolygonShapeConf &arg) noexcept |
| | Gets the mass data for the given shape configuration.
|
| |
| void | Transform (PolygonShapeConf &arg, const Mat22 &m) noexcept |
| | Transforms the given polygon configuration's vertices by the given transformation matrix. More...
|
| |
| bool | TestPoint (const Shape &shape, Length2 point) noexcept |
| | Test a point for containment in the given shape. More...
|
| |
| ChildCounter | GetChildCount (const Shape &shape) noexcept |
| | Gets the number of child primitives of the shape. More...
|
| |
| DistanceProxy | GetChild (const Shape &shape, ChildCounter index) |
| | Gets the "child" for the given index. More...
|
| |
| MassData | GetMassData (const Shape &shape) noexcept |
| | Gets the mass properties of this shape using its dimensions and density. More...
|
| |
| Real | GetFriction (const Shape &shape) noexcept |
| | Gets the coefficient of friction. More...
|
| |
|
Real | GetRestitution (const Shape &shape) noexcept |
| | Gets the coefficient of restitution value of the given shape.
|
| |
| NonNegative< AreaDensity > | GetDensity (const Shape &shape) noexcept |
| | Gets the density of the given shape. More...
|
| |
| NonNegative< Length > | GetVertexRadius (const Shape &shape, ChildCounter idx) |
| | Gets the vertex radius of the indexed child of the given shape. More...
|
| |
| void | Transform (Shape &shape, const Mat22 &m) |
| | Transforms all of the given shape's vertices by the given transformation matrix. More...
|
| |
| const void * | GetData (const Shape &shape) noexcept |
| | Gets a pointer to the underlying data. More...
|
| |
| TypeID | GetType (const Shape &shape) noexcept |
| | Gets the type info of the use of the given shape. More...
|
| |
| template<typename T > |
| std::add_pointer_t< std::add_const_t< T > > | TypeCast (const Shape *value) noexcept |
| | Converts the given shape into its current configuration value. More...
|
| |
|
bool | operator== (const Shape &lhs, const Shape &rhs) noexcept |
| | Equality operator for shape to shape comparisons.
|
| |
|
bool | operator!= (const Shape &lhs, const Shape &rhs) noexcept |
| | Inequality operator for shape to shape comparisons.
|
| |
| template<typename T > |
| T | TypeCast (const Shape &value) |
| | Casts the specified instance into the template specified type. More...
|
| |
|
constexpr NonNegative< AreaDensity > | GetDensity (const BaseShapeConf &arg) noexcept |
| | Gets the density of the given shape configuration.
|
| |
|
constexpr Finite< Real > | GetRestitution (const BaseShapeConf &arg) noexcept |
| | Gets the restitution of the given shape configuration.
|
| |
|
constexpr NonNegative< Real > | GetFriction (const BaseShapeConf &arg) noexcept |
| | Gets the friction of the given shape configuration.
|
| |
| SeparationInfo | GetMaxSeparation4x4 (const DistanceProxy &proxy1, Transformation xf1, const DistanceProxy &proxy2, Transformation xf2) |
| | Gets the max separation information for the first four vertices of the two given shapes. More...
|
| |
| SeparationInfo | GetMaxSeparation (const DistanceProxy &proxy1, Transformation xf1, const DistanceProxy &proxy2, Transformation xf2) |
| | Gets the max separation information. More...
|
| |
| SeparationInfo | GetMaxSeparation (const DistanceProxy &proxy1, Transformation xf1, const DistanceProxy &proxy2, Transformation xf2, Length stop) |
| | Gets the max separation information. More...
|
| |
| SeparationInfo | GetMaxSeparation (const DistanceProxy &proxy1, const DistanceProxy &proxy2, Length stop=MaxFloat *Meter) |
| | Gets the max separation information. More...
|
| |
|
IndexPair3 | GetIndexPairs (const SimplexEdges &collection) noexcept |
| | Gets index pairs for the given edges collection.
|
| |
| Length2 | CalcSearchDirection (const SimplexEdges &simplexEdges) noexcept |
| | Calculates the "search direction" for the given simplex edge list. More...
|
| |
|
Length2 | GetScaledDelta (const Simplex &simplex, Simplex::size_type index) |
| | Gets the scaled delta for the given indexed element of the given simplex.
|
| |
|
constexpr Length2 | GetClosestPoint (const Simplex &simplex) |
| | Gets the "closest point".
|
| |
| constexpr Length2 | GetPointDelta (const SimplexEdge &sv) noexcept |
| | Gets "w". More...
|
| |
|
constexpr bool | operator== (const SimplexEdge &lhs, const SimplexEdge &rhs) noexcept |
| | Equality operator for SimplexEdge.
|
| |
|
constexpr bool | operator!= (const SimplexEdge &lhs, const SimplexEdge &rhs) noexcept |
| | Inequality operator for SimplexEdge.
|
| |
| TOIOutput | GetToiViaSat (const DistanceProxy &proxyA, const Sweep &sweepA, const DistanceProxy &proxyB, const Sweep &sweepB, ToiConf conf=GetDefaultToiConf()) |
| | Gets the time of impact for two disjoint convex sets using the Separating Axis Theorem. More...
|
| |
| WorldManifold | GetWorldManifold (const Manifold &manifold, Transformation xfA, Length radiusA, Transformation xfB, Length radiusB) |
| | Gets the world manifold for the given data. More...
|
| |
| WorldManifold | GetWorldManifold (const World &world, const Contact &contact, const Manifold &manifold) |
| | Gets the world manifold for the given data. More...
|
| |
|
constexpr bool | operator== (const Acceleration &lhs, const Acceleration &rhs) |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const Acceleration &lhs, const Acceleration &rhs) |
| | Inequality operator.
|
| |
|
constexpr Acceleration & | operator*= (Acceleration &lhs, const Real rhs) |
| | Multiplication assignment operator.
|
| |
|
constexpr Acceleration & | operator/= (Acceleration &lhs, const Real rhs) |
| | Division assignment operator.
|
| |
|
constexpr Acceleration & | operator+= (Acceleration &lhs, const Acceleration &rhs) |
| | Addition assignment operator.
|
| |
|
constexpr Acceleration | operator+ (const Acceleration &lhs, const Acceleration &rhs) |
| | Addition operator.
|
| |
|
constexpr Acceleration & | operator-= (Acceleration &lhs, const Acceleration &rhs) |
| | Subtraction assignment operator.
|
| |
|
constexpr Acceleration | operator- (const Acceleration &lhs, const Acceleration &rhs) |
| | Subtraction operator.
|
| |
|
constexpr Acceleration | operator- (const Acceleration &value) |
| | Negation operator.
|
| |
|
constexpr Acceleration | operator+ (const Acceleration &value) |
| | Positive operator.
|
| |
|
constexpr Acceleration | operator* (const Acceleration &lhs, const Real rhs) |
| | Multiplication operator.
|
| |
|
constexpr Acceleration | operator* (const Real lhs, const Acceleration &rhs) |
| | Multiplication operator.
|
| |
|
constexpr Acceleration | operator/ (const Acceleration &lhs, const Real rhs) |
| | Division operator.
|
| |
| LinearVelocity2 | GetContactRelVelocity (const Velocity velA, const Length2 relA, const Velocity velB, const Length2 relB) noexcept |
| | Gets the contact relative velocity. More...
|
| |
|
constexpr Vec2 | GetVec2 (const UnitVec value) |
| | Gets a Vec2 representation of the given value.
|
| |
|
Angle | GetAngle (const UnitVec value) |
| | Gets the angle of the given unit vector.
|
| |
|
Angle | GetAngle (const Transformation &value) |
| | Gets the angle of the given transformation.
|
| |
|
template<class T , typename U > |
| constexpr Vector2< T > | operator* (CheckedValue< T, U > s, UnitVec u) noexcept |
| | Multiplication operator.
|
| |
|
template<class T > |
| constexpr Vector2< T > | operator* (const T s, const UnitVec u) noexcept |
| | Multiplication operator.
|
| |
|
template<class T , typename U > |
| constexpr Vector2< T > | operator* (UnitVec u, CheckedValue< T, U > s) noexcept |
| | Multiplication operator.
|
| |
|
template<class T > |
| constexpr Vector2< T > | operator* (const UnitVec u, const T s) noexcept |
| | Multiplication operator.
|
| |
|
constexpr Vec2 | operator/ (const UnitVec u, const UnitVec::value_type s) noexcept |
| | Division operator.
|
| |
| template<class T > |
| constexpr auto | Rotate (const Vector2< T > vector, const UnitVec &angle) noexcept |
| | Rotates a vector by a given angle. More...
|
| |
| template<class T > |
| constexpr auto | InverseRotate (const Vector2< T > vector, const UnitVec &angle) noexcept |
| | Inverse rotates a vector. More...
|
| |
| template<class T > |
| UnitVec | GetUnitVector (Vector2< T > value, UnitVec fallback=UnitVec::GetDefaultFallback()) |
| | Gets the unit vector for the given value. More...
|
| |
| Position | GetNormalized (const Position &val) noexcept |
| | Gets the "normalized" position. More...
|
| |
| Sweep | GetNormalized (Sweep sweep) noexcept |
| | Gets a sweep with the given sweep's angles normalized. More...
|
| |
| constexpr Length2 | Transform (const Length2 v, const Transformation xfm) noexcept |
| | Transforms the given 2-D vector with the given transformation. More...
|
| |
| constexpr Length2 | InverseTransform (const Length2 v, const Transformation xfm) noexcept |
| | Inverse transforms the given 2-D vector with the given transformation. More...
|
| |
| constexpr Transformation | Mul (const Transformation &A, const Transformation &B) noexcept |
| | Multiplies a given transformation by another given transformation. More...
|
| |
| constexpr Transformation | MulT (const Transformation &A, const Transformation &B) noexcept |
| | Inverse multiplies a given transformation by another given transformation. More...
|
| |
|
constexpr Transformation | GetTransformation (const Length2 ctr, const UnitVec rot, const Length2 localCtr) noexcept |
| | Gets the transformation for the given values.
|
| |
|
Transformation | GetTransformation (const Position pos, const Length2 local_ctr) noexcept |
| | Gets the transformation for the given values.
|
| |
| Transformation | GetTransformation (const Sweep &sweep, const Real beta) noexcept |
| | Gets the interpolated transform at a specific time. More...
|
| |
| Transformation | GetTransform0 (const Sweep &sweep) noexcept |
| | Gets the transform at "time" zero. More...
|
| |
| Transformation | GetTransform1 (const Sweep &sweep) noexcept |
| | Gets the transform at "time" one. More...
|
| |
|
bool | IsUnderActive (Velocity velocity, LinearVelocity linSleepTol, AngularVelocity angSleepTol) noexcept |
| | Gets whether the given velocity is "under active" based on the given tolerances.
|
| |
|
InvMass | GetEffectiveInvMass (const InvRotInertia invRotI, const Length2 p, const UnitVec q) |
| | Gets the "effective" inverse mass.
|
| |
| constexpr auto | GetReflectionMatrix (UnitVec axis) |
| | Gets the reflection matrix for the given unit vector that defines the normal of the line through the origin that points should be reflected against. More...
|
| |
|
constexpr bool | operator== (const Position &lhs, const Position &rhs) |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const Position &lhs, const Position &rhs) |
| | Inequality operator.
|
| |
|
constexpr Position | operator- (const Position &value) |
| | Negation operator.
|
| |
|
constexpr Position | operator+ (const Position &value) |
| | Positive operator.
|
| |
|
constexpr Position & | operator+= (Position &lhs, const Position &rhs) |
| | Addition assignment operator.
|
| |
|
constexpr Position | operator+ (const Position &lhs, const Position &rhs) |
| | Addition operator.
|
| |
|
constexpr Position & | operator-= (Position &lhs, const Position &rhs) |
| | Subtraction assignment operator.
|
| |
|
constexpr Position | operator- (const Position &lhs, const Position &rhs) |
| | Subtraction operator.
|
| |
|
constexpr Position | operator* (const Position &pos, const Real scalar) |
| | Multiplication operator.
|
| |
|
constexpr Position | operator* (const Real scalar, const Position &pos) |
| | Multiplication operator.
|
| |
| constexpr Position | GetPosition (const Position pos0, const Position pos1, const Real beta) noexcept |
| | Gets the position between two positions at a given unit interval. More...
|
| |
|
constexpr bool | operator== (const Sweep &lhs, const Sweep &rhs) |
| | Equals operator.
|
| |
|
constexpr bool | operator!= (const Sweep &lhs, const Sweep &rhs) |
| | Not-equals operator.
|
| |
|
constexpr bool | operator== (const Transformation &lhs, const Transformation &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const Transformation &lhs, const Transformation &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Length2 | GetLocation (const Transformation &value) noexcept |
| | Gets the location information from the given transformation.
|
| |
|
constexpr UnitVec | GetDirection (const Transformation &value) noexcept |
| | Gets the directional information from the given transformation.
|
| |
|
constexpr UnitVec | GetXAxis (UnitVec rot) noexcept |
| | Gets the "X-axis".
|
| |
| constexpr UnitVec | GetYAxis (UnitVec rot) noexcept |
| | Gets the "Y-axis". More...
|
| |
|
constexpr bool | operator== (const UnitVec a, const UnitVec b) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const UnitVec a, const UnitVec b) noexcept |
| | Inequality operator.
|
| |
| constexpr UnitVec | GetRevPerpendicular (const UnitVec vector) noexcept |
| | Gets a vector counter-clockwise (reverse-clockwise) perpendicular to the given vector. More...
|
| |
| constexpr UnitVec | GetFwdPerpendicular (const UnitVec vector) noexcept |
| | Gets a vector clockwise (forward-clockwise) perpendicular to the given vector. More...
|
| |
| constexpr UnitVec | Rotate (const UnitVec vector, const UnitVec &angle) noexcept |
| | Rotates a unit vector by the angle expressed by the second unit vector. More...
|
| |
|
constexpr UnitVec | InverseRotate (const UnitVec vector, const UnitVec &angle) noexcept |
| | Inverse rotates a vector.
|
| |
|
template<std::size_t I> |
| constexpr UnitVec::value_type | get (UnitVec v) noexcept |
| | Gets the specified element of the given collection.
|
| |
|
template<> |
| constexpr UnitVec::value_type | get< 0 > (UnitVec v) noexcept |
| | Gets element 0 of the given collection.
|
| |
|
template<> |
| constexpr UnitVec::value_type | get< 1 > (UnitVec v) noexcept |
| | Gets element 1 of the given collection.
|
| |
|
inline ::std::ostream & | operator<< (::std::ostream &os, const UnitVec &value) |
| | Output stream operator.
|
| |
| Velocity | Cap (Velocity velocity, Time h, const MovementConf &conf) noexcept |
| | Caps velocity. More...
|
| |
|
constexpr bool | operator== (const Velocity &lhs, const Velocity &rhs) |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const Velocity &lhs, const Velocity &rhs) |
| | Inequality operator.
|
| |
|
constexpr Velocity & | operator*= (Velocity &lhs, const Real rhs) |
| | Multiplication assignment operator.
|
| |
|
constexpr Velocity & | operator/= (Velocity &lhs, const Real rhs) |
| | Division assignment operator.
|
| |
|
constexpr Velocity & | operator+= (Velocity &lhs, const Velocity &rhs) |
| | Addition assignment operator.
|
| |
|
constexpr Velocity | operator+ (const Velocity &lhs, const Velocity &rhs) |
| | Addition operator.
|
| |
|
constexpr Velocity & | operator-= (Velocity &lhs, const Velocity &rhs) |
| | Subtraction assignment operator.
|
| |
|
constexpr Velocity | operator- (const Velocity &lhs, const Velocity &rhs) |
| | Subtraction operator.
|
| |
|
constexpr Velocity | operator- (const Velocity &value) |
| | Negation operator.
|
| |
|
constexpr Velocity | operator+ (const Velocity &value) |
| | Positive operator.
|
| |
|
constexpr Velocity | operator* (const Velocity &lhs, const Real rhs) |
| | Multiplication operator.
|
| |
|
constexpr Velocity | operator* (const Real lhs, const Velocity &rhs) |
| | Multiplication operator.
|
| |
|
constexpr Velocity | operator/ (const Velocity &lhs, const Real rhs) |
| | Division operator.
|
| |
| Velocity | GetVelocity (const Body &body, Time h) noexcept |
| | Gets the velocity of the body after the given time accounting for the body's acceleration and capped by the given configuration. More...
|
| |
| void | ApplyLinearImpulse (Body &body, Momentum2 impulse, Length2 point) noexcept |
| | Applies an impulse at a point. More...
|
| |
| void | ApplyAngularImpulse (Body &body, AngularMomentum impulse) noexcept |
| | Applies an angular impulse. More...
|
| |
|
bool | operator== (const Body &lhs, const Body &rhs) |
| | Equals operator.
|
| |
| BodyType | GetType (const Body &body) noexcept |
| | Gets the type of this body. More...
|
| |
| void | SetType (Body &body, BodyType value) noexcept |
| | Sets the type of this body. More...
|
| |
| bool | IsSpeedable (const Body &body) noexcept |
| | Is "speedable". More...
|
| |
| bool | IsAccelerable (const Body &body) noexcept |
| | Is "accelerable". More...
|
| |
| bool | IsImpenetrable (const Body &body) noexcept |
| | Is this body treated like a bullet for continuous collision detection? More...
|
| |
| void | SetImpenetrable (Body &body) noexcept |
| | Sets the impenetrable status of this body. More...
|
| |
| void | UnsetImpenetrable (Body &body) noexcept |
| | Unsets the impenetrable status of this body. More...
|
| |
| bool | IsSleepingAllowed (const Body &body) noexcept |
| | Gets whether or not this body allowed to sleep. More...
|
| |
| void | SetSleepingAllowed (Body &body, bool value) noexcept |
| | You can disable sleeping on this body. If you disable sleeping, the body will be woken. More...
|
| |
| bool | IsEnabled (const Body &body) noexcept |
| | Gets the enabled/disabled state of the body. More...
|
| |
| void | SetEnabled (Body &body) noexcept |
| | Sets the enabled state. More...
|
| |
| void | UnsetEnabled (Body &body) noexcept |
| | Unsets the enabled state. More...
|
| |
| void | SetEnabled (Body &body, bool value) noexcept |
| | Sets the enabled state to the given value. More...
|
| |
| bool | IsAwake (const Body &body) noexcept |
| | Gets the awake/asleep state of this body. More...
|
| |
| void | SetAwake (Body &body) noexcept |
| | Awakens this body. More...
|
| |
| void | UnsetAwake (Body &body) noexcept |
| | Sets this body to asleep if sleeping is allowed. More...
|
| |
| Transformation | GetTransformation (const Body &body) noexcept |
| | Gets the body's transformation. More...
|
| |
| void | SetTransformation (Body &body, Transformation value) noexcept |
| | Sets the body's transformation. More...
|
| |
| Length2 | GetLocation (const Body &body) noexcept |
| | Gets the body's origin location. More...
|
| |
| const Sweep & | GetSweep (const Body &body) noexcept |
| | Gets the body's sweep. More...
|
| |
| void | SetSweep (Body &body, const Sweep &value) noexcept |
| | Sets the sweep value of the given body. More...
|
| |
|
Position | GetPosition1 (const Body &body) noexcept |
| | Gets the "position 1" Position information for the given body.
|
| |
| Angle | GetAngle (const Body &body) noexcept |
| | Gets the body's angle. More...
|
| |
|
Length2 | GetWorldCenter (const Body &body) noexcept |
| | Get the world position of the center of mass.
|
| |
|
Length2 | GetLocalCenter (const Body &body) noexcept |
| | Gets the local position of the center of mass.
|
| |
|
Position | GetPosition (const Body &body) noexcept |
| | Gets the body's position.
|
| |
| Time | GetUnderActiveTime (const Body &body) noexcept |
| | Gets the given body's under-active time. More...
|
| |
| bool | IsFixedRotation (const Body &body) noexcept |
| | Does this body have fixed rotation? More...
|
| |
| void | SetFixedRotation (Body &body, bool value) |
| | Sets this body to have fixed rotation. More...
|
| |
|
bool | IsMassDataDirty (const Body &body) noexcept |
| | Gets whether the mass data for this body is "dirty".
|
| |
| InvMass | GetInvMass (const Body &body) noexcept |
| | Gets the inverse total mass of the body. More...
|
| |
| InvRotInertia | GetInvRotInertia (const Body &body) noexcept |
| | Gets the inverse rotational inertia of the body. More...
|
| |
| Frequency | GetLinearDamping (const Body &body) noexcept |
| | Gets the linear damping of the body. More...
|
| |
| void | SetLinearDamping (Body &body, NonNegative< Frequency > value) noexcept |
| | Sets the linear damping of the body. More...
|
| |
| Frequency | GetAngularDamping (const Body &body) noexcept |
| | Gets the angular damping of the body. More...
|
| |
| void | SetAngularDamping (Body &body, NonNegative< Frequency > value) noexcept |
| | Sets the angular damping of the body. More...
|
| |
| Acceleration | GetAcceleration (const Body &body) noexcept |
| | Gets the given body's acceleration. More...
|
| |
| void | SetAcceleration (Body &body, Acceleration value) noexcept |
| | Sets the accelerations on the given body. More...
|
| |
| LinearAcceleration2 | GetLinearAcceleration (const Body &body) noexcept |
| | Gets this body's linear acceleration. More...
|
| |
| AngularAcceleration | GetAngularAcceleration (const Body &body) noexcept |
| | Gets this body's angular acceleration. More...
|
| |
| bool | Awaken (Body &body) noexcept |
| | Awakens the body if it's asleep. More...
|
| |
| bool | Unawaken (Body &body) noexcept |
| | Puts the body to sleep if it's awake. More...
|
| |
| Mass | GetMass (const Body &body) noexcept |
| | Gets the mass of the body. More...
|
| |
|
void | SetMass (Body &body, Mass mass) |
| | Sets the mass of the given body.
|
| |
| void | SetAcceleration (Body &body, LinearAcceleration2 linear, AngularAcceleration angular) noexcept |
| | Sets the linear and rotational accelerations on this body. More...
|
| |
| void | SetAcceleration (Body &body, LinearAcceleration2 value) noexcept |
| | Sets the given linear acceleration of the given body. More...
|
| |
| void | SetAcceleration (Body &body, AngularAcceleration value) noexcept |
| | Sets the given angular acceleration of the given body. More...
|
| |
| RotInertia | GetRotInertia (const Body &body) noexcept |
| | Gets the rotational inertia of the body. More...
|
| |
| RotInertia | GetLocalRotInertia (const Body &body) noexcept |
| | Gets the rotational inertia of the body about the local origin. More...
|
| |
| Velocity | GetVelocity (const Body &body) noexcept |
| | Gets the velocity. More...
|
| |
| void | SetVelocity (Body &body, const Velocity &value) noexcept |
| | Sets the body's velocity (linear and angular velocity). More...
|
| |
| LinearVelocity2 | GetLinearVelocity (const Body &body) noexcept |
| | Gets the linear velocity of the center of mass. More...
|
| |
| AngularVelocity | GetAngularVelocity (const Body &body) noexcept |
| | Gets the angular velocity. More...
|
| |
| void | SetVelocity (Body &body, LinearVelocity2 value) noexcept |
| | Sets the linear velocity of the center of mass. More...
|
| |
| void | SetVelocity (Body &body, AngularVelocity value) noexcept |
| | Sets the angular velocity. More...
|
| |
| Length2 | GetWorldPoint (const Body &body, const Length2 localPoint) noexcept |
| | Gets the world coordinates of a point given in coordinates relative to the body's origin. More...
|
| |
| Length2 | GetWorldVector (const Body &body, const Length2 localVector) noexcept |
| | Gets the world coordinates of a vector given the local coordinates. More...
|
| |
|
UnitVec | GetWorldVector (const Body &body, const UnitVec localVector) noexcept |
| | Gets the world vector for the given local vector from the given body's transformation.
|
| |
| Length2 | GetLocalPoint (const Body &body, const Length2 worldPoint) noexcept |
| | Gets a local point relative to the body's origin given a world point. More...
|
| |
| UnitVec | GetLocalVector (const Body &body, const UnitVec uv) noexcept |
| | Gets a locally oriented unit vector given a world oriented unit vector. More...
|
| |
| LinearVelocity2 | GetLinearVelocityFromWorldPoint (const Body &body, const Length2 worldPoint) noexcept |
| | Gets the linear velocity from a world point attached to this body. More...
|
| |
| LinearVelocity2 | GetLinearVelocityFromLocalPoint (const Body &body, const Length2 localPoint) noexcept |
| | Gets the linear velocity from a local point. More...
|
| |
|
Force2 | GetForce (const Body &body) noexcept |
| | Gets the net force that the given body is currently experiencing.
|
| |
|
Torque | GetTorque (const Body &body) noexcept |
| | Gets the net torque that the given body is currently experiencing.
|
| |
|
bool | operator!= (const Body &lhs, const Body &rhs) |
| | Not-equals operator.
|
| |
| BodyConf | GetBodyConf (const Body &body) noexcept |
| | Gets the body definition for the given body. More...
|
| |
|
Transformation | GetTransformation (const BodyConf &conf) noexcept |
| | Gets the transformation associated with the given configuration.
|
| |
|
constexpr BodyConf | GetDefaultBodyConf () noexcept |
| | Gets the default body definition.
|
| |
|
constexpr Angle | GetAngle (const BodyConf &conf) noexcept |
| | Gets the angle of the given configuration.
|
| |
|
constexpr bool | operator== (const BodyConf &lhs, const BodyConf &rhs) noexcept |
| | Operator equals.
|
| |
|
constexpr bool | operator!= (const BodyConf &lhs, const BodyConf &rhs) noexcept |
| | Operator not-equals.
|
| |
|
ContactImpulsesList | GetContactImpulses (const VelocityConstraint &vc) |
| | Gets the contact impulses for the given velocity constraint.
|
| |
|
Momentum | GetMaxNormalImpulse (const ContactImpulsesList &impulses) noexcept |
| | Gets the maximum normal impulse from the given contact impulses list.
|
| |
|
BodyConstraint | GetBodyConstraint (const Body &body, Time time, MovementConf conf) noexcept |
| | Gets the BodyConstraint based on the given parameters.
|
| |
|
BodyID | GetBodyA (const Contact &contact) noexcept |
| | Gets the body A ID of the given contact.
|
| |
|
BodyID | GetBodyB (const Contact &contact) noexcept |
| | Gets the body B ID of the given contact.
|
| |
|
FixtureID | GetFixtureA (const Contact &contact) noexcept |
| | Gets the fixture A associated with the given contact.
|
| |
|
FixtureID | GetFixtureB (const Contact &contact) noexcept |
| | Gets the fixture B associated with the given contact.
|
| |
|
ChildCounter | GetChildIndexA (const Contact &contact) noexcept |
| | Gets the child index A of the given contact.
|
| |
|
ChildCounter | GetChildIndexB (const Contact &contact) noexcept |
| | Gets the child index B of the given contact.
|
| |
|
bool | IsImpenetrable (const Contact &contact) noexcept |
| | Whether the given contact is "impenetrable".
|
| |
|
bool | IsActive (const Contact &contact) noexcept |
| | Determines whether the given contact is "active".
|
| |
|
bool | IsEnabled (const Contact &contact) noexcept |
| | Gets whether the given contact is enabled or not.
|
| |
| void | SetEnabled (Contact &contact) noexcept |
| | Enables the identified contact. More...
|
| |
| void | UnsetEnabled (Contact &contact) noexcept |
| | Disables the identified contact. More...
|
| |
|
bool | IsTouching (const Contact &contact) noexcept |
| | Gets whether the given contact is touching or not.
|
| |
|
bool | IsSensor (const Contact &contact) noexcept |
| | Gets whether the given contact is for sensors or not.
|
| |
|
auto | GetToiCount (const Contact &contact) noexcept |
| | Gets the time of impact count.
|
| |
|
auto | NeedsFiltering (const Contact &contact) noexcept |
| | Whether or not the contact needs filtering.
|
| |
|
auto | NeedsUpdating (const Contact &contact) noexcept |
| | Whether or not the contact needs updating.
|
| |
| auto | HasValidToi (const Contact &contact) noexcept |
| | Gets whether a TOI is set. More...
|
| |
| Real | GetToi (const Contact &contact) noexcept |
| | Gets the time of impact (TOI) as a fraction. More...
|
| |
| auto | GetFriction (const Contact &contact) noexcept |
| | Gets the coefficient of friction. More...
|
| |
| void | SetFriction (Contact &contact, Real value) noexcept |
| | Sets the friction value for the identified contact. More...
|
| |
| auto | GetRestitution (const Contact &contact) noexcept |
| | Gets the coefficient of restitution. More...
|
| |
| void | SetRestitution (Contact &contact, Real value) |
| | Sets the restitution value for the identified contact. More...
|
| |
| auto | GetTangentSpeed (const Contact &contact) noexcept |
| | Gets the desired tangent speed. More...
|
| |
| void | SetTangentSpeed (Contact &contact, LinearVelocity value) noexcept |
| | Sets the desired tangent speed for a conveyor belt behavior. More...
|
| |
|
PositionSolution | operator+ (PositionSolution lhs, PositionSolution rhs) |
| | Addition operator.
|
| |
|
PositionSolution | operator- (PositionSolution lhs, PositionSolution rhs) |
| | Subtraction operator.
|
| |
|
ContactID | GetContactPtr (KeyedContactPtr value) |
| | Gets the contact ID for the given value.
|
| |
| PositionSolverManifold | GetPSM (const Manifold &manifold, Manifold::size_type index, const Transformation &xfA, const Transformation &xfB) |
| | Gets the normal-point-separation data in world coordinates for the given inputs. More...
|
| |
|
VelocityConstraint::Conf | GetRegVelocityConstraintConf (const StepConf &conf) noexcept |
| | Gets the regular phase velocity constraint configuration from the given step configuration.
|
| |
|
VelocityConstraint::Conf | GetToiVelocityConstraintConf (const StepConf &conf) noexcept |
| | Gets the TOI phase velocity constraint configuration from the given step configuration.
|
| |
| UnitVec | GetNormal (const VelocityConstraint &vc) noexcept |
| | Gets the normal of the velocity constraint contact in world coordinates. More...
|
| |
|
UnitVec | GetTangent (const VelocityConstraint &vc) noexcept |
| | Gets the tangent from the given velocity constraint data.
|
| |
|
Length2 | GetPointRelPosA (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the point relative position A data.
|
| |
|
Length2 | GetPointRelPosB (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the point relative position B data.
|
| |
|
LinearVelocity | GetVelocityBiasAtPoint (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the velocity bias at the given point from the given velocity constraint.
|
| |
|
Mass | GetNormalMassAtPoint (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the normal mass at the given point from the given velocity constraint.
|
| |
|
Mass | GetTangentMassAtPoint (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the tangent mass at the given point from the given velocity constraint.
|
| |
|
Momentum | GetNormalImpulseAtPoint (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the normal impulse at the given point from the given velocity constraint.
|
| |
|
Momentum | GetTangentImpulseAtPoint (const VelocityConstraint &vc, VelocityConstraint::size_type index) |
| | Gets the tangent impulse at the given point from the given velocity constraint.
|
| |
|
Momentum2 | GetNormalImpulses (const VelocityConstraint &vc) |
| | Gets the normal impulses of the given velocity constraint.
|
| |
|
Momentum2 | GetTangentImpulses (const VelocityConstraint &vc) |
| | Gets the tangent impulses of the given velocity constraint.
|
| |
|
void | SetNormalImpulseAtPoint (VelocityConstraint &vc, VelocityConstraint::size_type index, Momentum value) |
| | Sets the normal impulse at the given point of the given velocity constraint.
|
| |
|
void | SetTangentImpulseAtPoint (VelocityConstraint &vc, VelocityConstraint::size_type index, Momentum value) |
| | Sets the tangent impulse at the given point of the given velocity constraint.
|
| |
|
void | SetNormalImpulses (VelocityConstraint &vc, const Momentum2 impulses) |
| | Sets the normal impulses of the given velocity constraint.
|
| |
|
void | SetTangentImpulses (VelocityConstraint &vc, const Momentum2 impulses) |
| | Sets the tangent impulses of the given velocity constraint.
|
| |
|
Real | GetDefaultFriction (const FixtureConf &fixtureA, const FixtureConf &fixtureB) |
| | Gets the default friction amount for the given fixtures.
|
| |
|
Real | GetDefaultRestitution (const FixtureConf &fixtureA, const FixtureConf &fixtureB) |
| | Gets the default restitution amount for the given fixtures.
|
| |
|
bool | operator== (const FixtureConf &lhs, const FixtureConf &rhs) |
| | Operator equals.
|
| |
|
bool | operator!= (const FixtureConf &lhs, const FixtureConf &rhs) |
| | Operator not-equals.
|
| |
|
BodyID | GetBody (const FixtureConf &conf) noexcept |
| | Gets the body of the given configuration.
|
| |
|
const Shape & | GetShape (const FixtureConf &conf) noexcept |
| | Gets the shape of the given configuration.
|
| |
|
NonNegative< AreaDensity > | GetDensity (const FixtureConf &conf) noexcept |
| | Gets the density of the given configuration.
|
| |
|
Real | GetFriction (const FixtureConf &conf) noexcept |
| | Gets the friction of the given configuration.
|
| |
|
Real | GetRestitution (const FixtureConf &conf) noexcept |
| | Gets the restitution of the given configuration.
|
| |
|
bool | IsSensor (const FixtureConf &conf) noexcept |
| | Gets whether or not the given configuration is a sensor.
|
| |
|
void | SetSensor (FixtureConf &conf, bool value) noexcept |
| | Sets whether or not the given configuration is a sensor.
|
| |
|
Filter | GetFilterData (const FixtureConf &conf) noexcept |
| | Gets the filter-data of the given configuration.
|
| |
|
void | SetFilterData (FixtureConf &conf, Filter value) noexcept |
| | Sets the filter-data of the given configuration.
|
| |
| bool | ShouldCollide (const FixtureConf &fixtureA, const FixtureConf &fixtureB) noexcept |
| | Whether contact calculations should be performed between the two fixtures. More...
|
| |
|
void | Reserve (Island &island, BodyCounter bodies, ContactCounter contacts, JointCounter joints) |
| | Reserves space ahead of time.
|
| |
|
void | Clear (Island &island) noexcept |
| | Clears the island containers.
|
| |
|
std::size_t | Count (const Island &island, BodyID entry) |
| | Counts the number of occurrences of the given entry in the given island.
|
| |
|
std::size_t | Count (const Island &island, ContactID entry) |
| | Counts the number of occurrences of the given entry in the given island.
|
| |
|
std::size_t | Count (const Island &island, JointID entry) |
| | Counts the number of occurrences of the given entry in the given island.
|
| |
|
bool | IsFullOfBodies (const Island &island) |
| | Determines whether the given island is full of bodies.
|
| |
|
bool | IsFullOfContacts (const Island &island) |
| | Determines whether the given island is full of contacts.
|
| |
|
DistanceJointConf | GetDistanceJointConf (const Joint &joint) noexcept |
| | Gets the definition data for the given joint.
|
| |
|
DistanceJointConf | GetDistanceJointConf (const World &world, BodyID bodyA, BodyID bodyB, Length2 anchorA=Length2{}, Length2 anchorB=Length2{}) |
| | Gets the configuration for the given parameters.
|
| |
| void | InitVelocity (DistanceJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (DistanceJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const DistanceJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const DistanceJointConf &lhs, const DistanceJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const DistanceJointConf &lhs, const DistanceJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const DistanceJointConf &object) noexcept |
| | Gets the current linear reaction for the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const DistanceJointConf &) noexcept |
| | Gets the current angular reaction for the given configuration.
|
| |
|
constexpr bool | ShiftOrigin (DistanceJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr void | SetFrequency (DistanceJointConf &object, NonNegative< Frequency > value) noexcept |
| | Free function for setting the frequency value of the given configuration.
|
| |
|
constexpr void | SetDampingRatio (DistanceJointConf &object, Real value) noexcept |
| | Free function for setting the damping ratio value of the given configuration.
|
| |
|
constexpr auto | GetLength (const DistanceJointConf &object) noexcept |
| | Free function for getting the length value of the given configuration.
|
| |
|
constexpr auto | SetLength (DistanceJointConf &object, Length value) noexcept |
| | Free function for setting the length value of the given configuration.
|
| |
|
FrictionJointConf | GetFrictionJointConf (const Joint &joint) noexcept |
| | Gets the definition data for the given joint.
|
| |
|
FrictionJointConf | GetFrictionJointConf (const World &world, BodyID bodyA, BodyID bodyB, Length2 anchor) |
| | Gets the confguration for the given parameters.
|
| |
| void | InitVelocity (FrictionJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (FrictionJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const FrictionJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const FrictionJointConf &lhs, const FrictionJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const FrictionJointConf &lhs, const FrictionJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const FrictionJointConf &object) noexcept |
| | Gets the current linear reaction for the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const FrictionJointConf &object) noexcept |
| | Gets the current angular reaction for the given configuration.
|
| |
|
constexpr bool | ShiftOrigin (FrictionJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr auto | GetMaxForce (const FrictionJointConf &object) noexcept |
| | Free function for getting the max force value of the given configuration.
|
| |
|
constexpr void | SetMaxForce (FrictionJointConf &object, NonNegative< Force > value) noexcept |
| | Free function for setting the max force value of the given configuration.
|
| |
|
constexpr auto | GetMaxTorque (const FrictionJointConf &object) noexcept |
| | Free function for getting the max torque value of the given configuration.
|
| |
|
constexpr auto | SetMaxTorque (FrictionJointConf &object, NonNegative< Torque > value) noexcept |
| | Free function for setting the max force value of the given configuration.
|
| |
|
GearJointConf | GetGearJointConf (const Joint &joint) noexcept |
| | Gets the definition data for the given joint.
|
| |
|
GearJointConf | GetGearJointConf (const World &world, JointID id1, JointID id2, Real ratio=Real{1}) |
| | Gets the configuration for the given parameters.
|
| |
| void | InitVelocity (GearJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (GearJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const GearJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const GearJointConf &lhs, const GearJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const GearJointConf &lhs, const GearJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const GearJointConf &object) |
| | Gets the current linear reaction for the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const GearJointConf &object) |
| | Gets the current angular reaction for the given configuration.
|
| |
|
constexpr bool | ShiftOrigin (GearJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr auto | GetRatio (const GearJointConf &object) noexcept |
| | Free function for getting the ratio value of the given configuration.
|
| |
|
constexpr auto | SetRatio (GearJointConf &object, Real value) noexcept |
| | Free function for setting the ratio value of the given configuration.
|
| |
|
constexpr auto | GetConstant (const GearJointConf &object) noexcept |
| | Free function for getting the constant value of the given configuration.
|
| |
|
constexpr auto | GetType1 (const GearJointConf &object) noexcept |
| | Free function for getting joint 1 type value of the given configuration.
|
| |
|
constexpr auto | GetType2 (const GearJointConf &object) noexcept |
| | Free function for getting joint 2 type value of the given configuration.
|
| |
|
BodyConstraint & | At (std::vector< BodyConstraint > &container, BodyID key) |
| | Provides referenced access to the identified element of the given container.
|
| |
|
Length2 | GetLocalAnchorA (const Joint &object) |
| | Get the anchor point on body-A in local coordinates.
|
| |
|
Length2 | GetLocalAnchorB (const Joint &object) |
| | Get the anchor point on body-B in local coordinates.
|
| |
|
Momentum2 | GetLinearReaction (const Joint &object) |
| | Get the linear reaction on body-B at the joint anchor.
|
| |
|
AngularMomentum | GetAngularReaction (const Joint &object) |
| | Get the angular reaction on body-B.
|
| |
| Angle | GetReferenceAngle (const Joint &object) |
| | Gets the reference angle of the joint if it has one. More...
|
| |
| UnitVec | GetLocalXAxisA (const Joint &object) |
| | Gets the given joint's local X axis A if its type supports that. More...
|
| |
| UnitVec | GetLocalYAxisA (const Joint &object) |
| | Gets the given joint's local Y axis A if its type supports that. More...
|
| |
| AngularVelocity | GetMotorSpeed (const Joint &object) |
| | Gets the given joint's motor speed if its type supports that. More...
|
| |
| void | SetMotorSpeed (Joint &object, AngularVelocity value) |
| | Sets the given joint's motor speed if its type supports that. More...
|
| |
| RotInertia | GetAngularMass (const Joint &object) |
| | Gets the given joint's angular mass. More...
|
| |
| Force | GetMaxForce (const Joint &object) |
| | Gets the given joint's max force if its type supports that. More...
|
| |
| Torque | GetMaxTorque (const Joint &object) |
| | Gets the given joint's max torque if its type supports that. More...
|
| |
| Force | GetMaxMotorForce (const Joint &object) |
| | Gets the given joint's max motor force if its type supports that. More...
|
| |
| void | SetMaxMotorForce (Joint &object, Force value) |
| | Sets the given joint's max motor force if its type supports that. More...
|
| |
| Torque | GetMaxMotorTorque (const Joint &object) |
| | Gets the given joint's max motor torque if its type supports that. More...
|
| |
| void | SetMaxMotorTorque (Joint &object, Torque value) |
| | Sets the given joint's max motor torque if its type supports that. More...
|
| |
| Real | GetRatio (const Joint &object) |
| | Gets the given joint's ratio property if it has one. More...
|
| |
| Real | GetDampingRatio (const Joint &object) |
| | Gets the given joint's damping ratio property if it has one. More...
|
| |
| Frequency | GetFrequency (const Joint &object) |
| | Gets the frequency of the joint if it has this property. More...
|
| |
| void | SetFrequency (Joint &object, Frequency value) |
| | Sets the frequency of the joint if it has this property. More...
|
| |
| AngularMomentum | GetAngularMotorImpulse (const Joint &object) |
| | Gets the angular motor impulse of the joint if it has this property. More...
|
| |
| Length2 | GetTarget (const Joint &object) |
| | Gets the given joint's target property if it has one. More...
|
| |
| void | SetTarget (Joint &object, Length2 value) |
| | Sets the given joint's target property if it has one. More...
|
| |
| Length | GetLinearLowerLimit (const Joint &object) |
| | Gets the lower linear joint limit. More...
|
| |
| Length | GetLinearUpperLimit (const Joint &object) |
| | Gets the upper linear joint limit. More...
|
| |
| void | SetLinearLimits (Joint &object, Length lower, Length upper) |
| | Sets the joint limits. More...
|
| |
| Angle | GetAngularLowerLimit (const Joint &object) |
| | Gets the lower joint limit. More...
|
| |
| Angle | GetAngularUpperLimit (const Joint &object) |
| | Gets the upper joint limit. More...
|
| |
| void | SetAngularLimits (Joint &object, Angle lower, Angle upper) |
| | Sets the joint limits. More...
|
| |
| bool | IsLimitEnabled (const Joint &object) |
| | Gets the specified joint's limit property if it supports one. More...
|
| |
| void | EnableLimit (Joint &object, bool value) |
| | Enables the specified joint's limit property if it supports one. More...
|
| |
| bool | IsMotorEnabled (const Joint &object) |
| | Gets the specified joint's motor property value if it supports one. More...
|
| |
| void | EnableMotor (Joint &object, bool value) |
| | Enables the specified joint's motor property if it supports one. More...
|
| |
| Length2 | GetLinearOffset (const Joint &object) |
| | Gets the linear offset property of the specified joint if its type has one. More...
|
| |
| void | SetLinearOffset (Joint &object, Length2 value) |
| | Sets the linear offset property of the specified joint if its type has one. More...
|
| |
| Angle | GetAngularOffset (const Joint &object) |
| | Gets the angular offset property of the specified joint if its type has one. More...
|
| |
| void | SetAngularOffset (Joint &object, Angle value) |
| | Sets the angular offset property of the specified joint if its type has one. More...
|
| |
| LimitState | GetLimitState (const Joint &object) |
| |
| Length2 | GetGroundAnchorA (const Joint &object) |
| |
| Length2 | GetGroundAnchorB (const Joint &object) |
| |
| Momentum | GetLinearMotorImpulse (const Joint &object) |
| |
| Length | GetLength (const Joint &object) |
| | Gets the length property of the specified joint if its type has one. More...
|
| |
|
TypeID | GetType (const Joint &object) noexcept |
| | Gets the identifier of the type of data this can be casted to.
|
| |
| template<typename T > |
| std::add_pointer_t< std::add_const_t< T > > | TypeCast (const Joint *value) noexcept |
| | Converts the given joint into its current configuration value. More...
|
| |
| template<typename T > |
| std::add_pointer_t< T > | TypeCast (Joint *value) noexcept |
| | Converts the given joint into its current configuration value. More...
|
| |
|
bool | operator== (const Joint &lhs, const Joint &rhs) noexcept |
| | Equality operator for joint comparisons.
|
| |
|
bool | operator!= (const Joint &lhs, const Joint &rhs) noexcept |
| | Inequality operator for joint comparisons.
|
| |
|
BodyID | GetBodyA (const Joint &object) noexcept |
| | Gets the first body attached to this joint.
|
| |
|
BodyID | GetBodyB (const Joint &object) noexcept |
| | Gets the second body attached to this joint.
|
| |
| bool | GetCollideConnected (const Joint &object) noexcept |
| | Gets collide connected. More...
|
| |
| bool | ShiftOrigin (Joint &object, Length2 value) noexcept |
| | Shifts the origin for any points stored in world coordinates. More...
|
| |
| void | InitVelocity (Joint &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (Joint &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const Joint &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
| template<typename T > |
| T | TypeCast (const Joint &value) |
| | Converts the given joint into its current configuration value. More...
|
| |
| template<typename T > |
| T | TypeCast (Joint &value) |
| | Converts the given joint into its current configuration value. More...
|
| |
| template<typename T > |
| T | TypeCast (Joint &&value) |
| | Converts the given joint into its current configuration value. More...
|
| |
| Torque | GetMotorTorque (const Joint &joint, Frequency inv_dt) |
| | Gets the current motor torque for the given joint given the inverse time step. More...
|
| |
|
void | Set (JointConf &def, const Joint &joint) noexcept |
| | Sets the joint definition data for the given joint.
|
| |
|
constexpr BodyID | GetBodyA (const JointConf &object) noexcept |
| | Gets the first body attached to this joint.
|
| |
|
constexpr BodyID | GetBodyB (const JointConf &object) noexcept |
| | Gets the second body attached to this joint.
|
| |
|
constexpr bool | GetCollideConnected (const JointConf &object) noexcept |
| | Gets whether attached bodies should collide or not.
|
| |
|
template<typename T > |
| constexpr auto | IsLimitEnabled (const T &conf) noexcept -> decltype(std::declval< T >().enableLimit) |
| |
|
template<typename T > |
| constexpr auto | EnableLimit (T &conf, bool v) noexcept -> decltype(std::declval< T >().UseEnableLimit(bool |
| |
|
template<typename T > |
| constexpr auto | GetLength (const T &conf) noexcept -> decltype(std::declval< T >().length) |
| |
|
template<typename T > |
| constexpr auto | GetMaxForce (const T &conf) noexcept -> decltype(std::declval< T >().maxForce) |
| |
|
template<typename T > |
| constexpr auto | GetMaxTorque (const T &conf) noexcept -> decltype(std::declval< T >().maxTorque) |
| |
|
template<typename T > |
| constexpr auto | GetRatio (const T &conf) noexcept -> decltype(std::declval< T >().ratio) |
| |
|
template<typename T > |
| constexpr auto | GetDampingRatio (const T &conf) noexcept -> decltype(std::declval< T >().dampingRatio) |
| |
|
template<typename T > |
| constexpr auto | GetReferenceAngle (const T &conf) noexcept -> decltype(std::declval< T >().referenceAngle) |
| |
|
template<typename T > |
| constexpr auto | GetLinearReaction (const T &conf) noexcept -> decltype(std::declval< T >().linearImpulse) |
| |
|
template<typename T > |
| constexpr auto | GetLinearOffset (const T &conf) noexcept -> decltype(std::declval< T >().linearOffset) |
| |
|
template<typename T > |
| constexpr auto | GetLimitState (const T &conf) noexcept -> decltype(std::declval< T >().limitState) |
| |
|
template<typename T > |
| constexpr auto | GetGroundAnchorA (const T &conf) noexcept -> decltype(std::declval< T >().groundAnchorA) |
| |
|
template<typename T > |
| constexpr auto | GetGroundAnchorB (const T &conf) noexcept -> decltype(std::declval< T >().groundAnchorB) |
| |
|
template<typename T > |
| constexpr auto | GetLocalAnchorA (const T &conf) noexcept -> decltype(std::declval< T >().localAnchorA) |
| |
|
template<typename T > |
| constexpr auto | GetLocalAnchorB (const T &conf) noexcept -> decltype(std::declval< T >().localAnchorB) |
| |
|
template<typename T > |
| constexpr auto | GetLocalXAxisA (const T &conf) noexcept -> decltype(std::declval< T >().localXAxisA) |
| |
|
template<typename T > |
| constexpr auto | GetLocalYAxisA (const T &conf) noexcept -> decltype(std::declval< T >().localYAxisA) |
| |
|
template<typename T > |
| constexpr auto | GetFrequency (const T &conf) noexcept -> decltype(std::declval< T >().frequency) |
| |
|
template<typename T > |
| constexpr auto | IsMotorEnabled (const T &conf) noexcept -> decltype(std::declval< T >().enableMotor) |
| |
|
template<typename T > |
| constexpr auto | EnableMotor (T &conf, bool v) noexcept -> decltype(std::declval< T >().UseEnableMotor(bool |
| |
|
template<typename T > |
| constexpr auto | GetMotorSpeed (const T &conf) noexcept -> decltype(std::declval< T >().motorSpeed) |
| |
|
template<typename T > |
| constexpr auto | SetMotorSpeed (T &conf, AngularVelocity v) noexcept -> decltype(std::declval< T >().UseMotorSpeed(AngularVelocity |
| |
|
template<typename T > |
| constexpr auto | GetLinearMotorImpulse (const T &conf) noexcept -> decltype(std::declval< T >().motorImpulse) |
| |
|
template<typename T > |
| constexpr auto | GetMaxMotorForce (const T &conf) noexcept -> decltype(std::declval< T >().maxMotorForce) |
| |
|
template<typename T > |
| constexpr auto | GetMaxMotorTorque (const T &conf) noexcept -> decltype(std::declval< T >().maxMotorTorque) |
| |
|
template<typename T > |
| constexpr auto | GetAngularOffset (const T &conf) noexcept -> decltype(std::declval< T >().angularOffset) |
| |
|
template<typename T > |
| constexpr auto | GetAngularReaction (const T &conf) noexcept -> decltype(std::declval< T >().angularImpulse) |
| |
|
template<typename T > |
| constexpr auto | GetAngularMass (const T &conf) noexcept -> decltype(std::declval< T >().angularMass) |
| |
|
template<typename T > |
| constexpr auto | GetAngularMotorImpulse (const T &conf) noexcept -> decltype(std::declval< T >().angularMotorImpulse) |
| |
|
JointKey | GetJointKey (const Joint &joint) noexcept |
| | Gets the JointKey for the given joint.
|
| |
|
constexpr int | Compare (const JointKey &lhs, const JointKey &rhs) noexcept |
| | Compares the given joint keys.
|
| |
|
constexpr bool | IsFor (const JointKey key, BodyID body) noexcept |
| | Determines whether the given key is for the given body.
|
| |
|
const char * | ToString (LimitState val) noexcept |
| | Provides a human readable C-style string uniquely identifying the given limit state.
|
| |
|
MotorJointConf | GetMotorJointConf (const Joint &joint) noexcept |
| | Gets the definition data for the given joint.
|
| |
|
MotorJointConf | GetMotorJointConf (const World &world, BodyID bA, BodyID bB) |
| | Gets the confguration for the given parameters.
|
| |
| void | InitVelocity (MotorJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (MotorJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const MotorJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const MotorJointConf &lhs, const MotorJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const MotorJointConf &lhs, const MotorJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr auto | GetLocalAnchorA (const MotorJointConf &) noexcept |
| | Gets the local anchor A.
|
| |
|
constexpr auto | GetLocalAnchorB (const MotorJointConf &) noexcept |
| | Gets the local anchor B.
|
| |
|
constexpr auto | ShiftOrigin (MotorJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr auto | GetMaxForce (const MotorJointConf &object) noexcept |
| | Free function for getting the maximum force value of the given configuration.
|
| |
|
constexpr auto | SetMaxForce (MotorJointConf &object, NonNegative< Force > value) noexcept |
| | Free function for setting the maximum force value of the given configuration.
|
| |
|
constexpr auto | GetMaxTorque (const MotorJointConf &object) noexcept |
| | Free function for getting the maximum torque value of the given configuration.
|
| |
|
constexpr auto | SetMaxTorque (MotorJointConf &object, NonNegative< Torque > value) noexcept |
| | Free function for setting the maximum torque value of the given configuration.
|
| |
|
constexpr auto | GetLinearError (const MotorJointConf &object) noexcept |
| | Free function for getting the linear error value of the given configuration.
|
| |
|
constexpr auto | GetAngularError (const MotorJointConf &object) noexcept |
| | Free function for getting the angular error value of the given configuration.
|
| |
|
constexpr auto | GetLinearOffset (const MotorJointConf &object) noexcept |
| | Free function for getting the linear offset value of the given configuration.
|
| |
|
constexpr auto | SetLinearOffset (MotorJointConf &object, Length2 value) noexcept |
| | Free function for setting the linear offset value of the given configuration.
|
| |
|
constexpr auto | GetAngularOffset (const MotorJointConf &object) noexcept |
| | Free function for getting the angular offset value of the given configuration.
|
| |
|
constexpr auto | SetAngularOffset (MotorJointConf &object, Angle value) noexcept |
| | Free function for setting the angular offset value of the given configuration.
|
| |
|
constexpr auto | GetCorrectionFactor (const MotorJointConf &object) noexcept |
| | Free function for getting the correction factor value of the given configuration.
|
| |
|
constexpr auto | SetCorrectionFactor (MotorJointConf &object, Real value) noexcept |
| | Free function for setting the correction factor value of the given configuration.
|
| |
|
PrismaticJointConf | GetPrismaticJointConf (const Joint &joint) |
| | Gets the definition data for the given joint.
|
| |
|
PrismaticJointConf | GetPrismaticJointConf (const World &world, BodyID bA, BodyID bB, const Length2 anchor, const UnitVec axis) |
| | Gets the configuration for the given parameters.
|
| |
|
Momentum2 | GetLinearReaction (const PrismaticJointConf &conf) |
| | Gets the current linear reaction of the given configuration.
|
| |
|
AngularMomentum | GetAngularReaction (const PrismaticJointConf &conf) |
| | Gets the current angular reaction of the given configuration.
|
| |
| void | InitVelocity (PrismaticJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (PrismaticJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const PrismaticJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
LinearVelocity | GetLinearVelocity (const World &world, const PrismaticJointConf &joint) noexcept |
| | Gets the current linear velocity of the given configuration.
|
| |
|
constexpr bool | operator== (const PrismaticJointConf &lhs, const PrismaticJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const PrismaticJointConf &lhs, const PrismaticJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr auto | GetLinearLowerLimit (const PrismaticJointConf &conf) noexcept |
| | Free function for getting the linear lower limit value of the given configuration.
|
| |
|
constexpr auto | GetLinearUpperLimit (const PrismaticJointConf &conf) noexcept |
| | Free function for getting the linear upper limit value of the given configuration.
|
| |
|
constexpr void | SetLinearLimits (PrismaticJointConf &conf, Length lower, Length upper) noexcept |
| | Free function for setting the linear limits of the given configuration.
|
| |
|
constexpr auto | ShiftOrigin (PrismaticJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr void | SetMaxMotorForce (PrismaticJointConf &object, Force value) |
| | Free function for setting the maximum motor torque value of the given configuration.
|
| |
|
PulleyJointConf | GetPulleyJointConf (const Joint &joint) |
| | Gets the definition data for the given joint.
|
| |
|
PulleyJointConf | GetPulleyJointConf (const World &world, BodyID bA, BodyID bB, Length2 groundA, Length2 groundB, Length2 anchorA, Length2 anchorB) |
| | Gets the configuration for the given parameters.
|
| |
| void | InitVelocity (PulleyJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (PulleyJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const PulleyJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
bool | ShiftOrigin (PulleyJointConf &object, Length2 newOrigin) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr bool | operator== (const PulleyJointConf &lhs, const PulleyJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const PulleyJointConf &lhs, const PulleyJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const PulleyJointConf &object) noexcept |
| | Gets the current linear reaction of the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const PulleyJointConf &) noexcept |
| | Gets the current angular reaction of the given configuration.
|
| |
|
constexpr auto | GetLengthA (const PulleyJointConf &object) noexcept |
| | Free function for getting the length A value of the given configuration.
|
| |
|
constexpr auto | GetLengthB (const PulleyJointConf &object) noexcept |
| | Free function for getting the length B value of the given configuration.
|
| |
|
constexpr auto | SetRatio (PulleyJointConf &object, Real value) noexcept |
| | Free function for setting the ratio value of the given configuration.
|
| |
|
RevoluteJointConf | GetRevoluteJointConf (const Joint &joint) |
| | Gets the definition data for the given joint.
|
| |
|
RevoluteJointConf | GetRevoluteJointConf (const World &world, BodyID bodyA, BodyID bodyB, Length2 anchor) |
| | Gets the configuration for the given parameters.
|
| |
|
Angle | GetAngle (const World &world, const RevoluteJointConf &conf) |
| | Gets the current angle of the given configuration in the given world.
|
| |
|
AngularVelocity | GetAngularVelocity (const World &world, const RevoluteJointConf &conf) |
| | Gets the current angular velocity of the given configuration.
|
| |
| void | InitVelocity (RevoluteJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (RevoluteJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const RevoluteJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const RevoluteJointConf &lhs, const RevoluteJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const RevoluteJointConf &lhs, const RevoluteJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr auto | ShiftOrigin (RevoluteJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr Angle | GetAngularLowerLimit (const RevoluteJointConf &conf) noexcept |
| | Free function for getting the angular lower limit value of the given configuration.
|
| |
|
constexpr Angle | GetAngularUpperLimit (const RevoluteJointConf &conf) noexcept |
| | Free function for getting the angular upper limit value of the given configuration.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const RevoluteJointConf &conf) noexcept |
| | Gets the current linear reaction of the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const RevoluteJointConf &conf) noexcept |
| | Gets the current angular reaction of the given configuration.
|
| |
|
constexpr void | SetAngularLimits (RevoluteJointConf &object, Angle lower, Angle upper) noexcept |
| | Free function for setting the angular limits of the given configuration.
|
| |
|
constexpr void | SetMaxMotorTorque (RevoluteJointConf &object, Torque value) |
| | Free function for setting the max motor torque of the given configuration.
|
| |
|
RopeJointConf | GetRopeJointConf (const Joint &joint) noexcept |
| | Gets the definition data for the given joint.
|
| |
| void | InitVelocity (RopeJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (RopeJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const RopeJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const RopeJointConf &lhs, const RopeJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const RopeJointConf &lhs, const RopeJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const RopeJointConf &object) noexcept |
| | Gets the current linear reaction of the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const RopeJointConf &) noexcept |
| | Gets the current angular reaction of the given configuration.
|
| |
|
constexpr auto | ShiftOrigin (RopeJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr auto | GetMaxLength (const RopeJointConf &object) noexcept |
| | Free function for getting the maximum length value of the given configuration.
|
| |
|
constexpr auto | SetMaxLength (RopeJointConf &object, Length value) noexcept |
| | Free function for setting the maximum length value of the given configuration.
|
| |
|
TargetJointConf | GetTargetJointConf (const Joint &joint) |
| | Gets the definition data for the given joint.
|
| |
|
Mass22 | GetEffectiveMassMatrix (const TargetJointConf &object, const BodyConstraint &body) noexcept |
| | Gets the effective mass matrix for the given configuration and body information.
|
| |
| void | InitVelocity (TargetJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (TargetJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const TargetJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const TargetJointConf &lhs, const TargetJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const TargetJointConf &lhs, const TargetJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr auto | GetLocalAnchorA (const TargetJointConf &) noexcept |
| | Gets the local anchar A for the given configuration.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const TargetJointConf &object) |
| | Gets the current linear reaction of the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const TargetJointConf &) |
| | Gets the current angular reaction of the given configuration.
|
| |
|
constexpr bool | ShiftOrigin (TargetJointConf &object, Length2 newOrigin) |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr auto | GetTarget (const TargetJointConf &object) noexcept |
| | Free function for getting the target value of the given configuration.
|
| |
|
constexpr void | SetTarget (TargetJointConf &object, Length2 value) noexcept |
| | Free function for setting the target value of the given configuration.
|
| |
|
constexpr auto | GetMaxForce (const TargetJointConf &object) noexcept |
| | Free function for getting the maximum force value of the given configuration.
|
| |
|
constexpr auto | SetMaxForce (TargetJointConf &object, NonNegative< Force > value) noexcept |
| | Free function for setting the maximum force value of the given configuration.
|
| |
|
constexpr void | SetFrequency (TargetJointConf &object, NonNegative< Frequency > value) noexcept |
| | Free function for setting the frequency value of the given configuration.
|
| |
|
constexpr void | SetDampingRatio (TargetJointConf &object, Real value) noexcept |
| | Free function for setting the damping ratio value of the given configuration.
|
| |
|
WeldJointConf | GetWeldJointConf (const Joint &joint) |
| | Gets the definition data for the given joint.
|
| |
|
WeldJointConf | GetWeldJointConf (const World &world, BodyID bodyA, BodyID bodyB, const Length2 anchor=Length2{}) |
| | Gets the configuration for the given parameters.
|
| |
| void | InitVelocity (WeldJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (WeldJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const WeldJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const WeldJointConf &lhs, const WeldJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const WeldJointConf &lhs, const WeldJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const WeldJointConf &object) noexcept |
| | Gets the current linear reaction of the given configuration.
|
| |
|
constexpr AngularMomentum | GetAngularReaction (const WeldJointConf &object) noexcept |
| | Gets the current angular reaction of the given configuration.
|
| |
|
constexpr auto | ShiftOrigin (WeldJointConf &, Length2) noexcept |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr void | SetFrequency (WeldJointConf &object, NonNegative< Frequency > value) noexcept |
| | Free function for setting the frequency of the given configuration.
|
| |
|
constexpr void | SetDampingRatio (WeldJointConf &object, Real value) noexcept |
| | Free function for setting the damping ratio of the given configuration.
|
| |
|
WheelJointConf | GetWheelJointConf (const Joint &joint) |
| | Gets the definition data for the given joint.
|
| |
|
WheelJointConf | GetWheelJointConf (const World &world, BodyID bodyA, BodyID bodyB, Length2 anchor, UnitVec axis=UnitVec::GetRight()) |
| | Gets the definition data for the given parameters.
|
| |
|
AngularVelocity | GetAngularVelocity (const World &world, const WheelJointConf &conf) |
| | Gets the angular velocity for the given configuration within the specified world.
|
| |
| void | InitVelocity (WheelJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step, const ConstraintSolverConf &conf) |
| | Initializes velocity constraint data based on the given solver data. More...
|
| |
| bool | SolveVelocity (WheelJointConf &object, std::vector< BodyConstraint > &bodies, const StepConf &step) |
| | Solves velocity constraint. More...
|
| |
| bool | SolvePosition (const WheelJointConf &object, std::vector< BodyConstraint > &bodies, const ConstraintSolverConf &conf) |
| | Solves the position constraint. More...
|
| |
|
constexpr bool | operator== (const WheelJointConf &lhs, const WheelJointConf &rhs) noexcept |
| | Equality operator.
|
| |
|
constexpr bool | operator!= (const WheelJointConf &lhs, const WheelJointConf &rhs) noexcept |
| | Inequality operator.
|
| |
|
constexpr Momentum2 | GetLinearReaction (const WheelJointConf &object) |
| | Gets the current linear reaction for the given configuration.
|
| |
|
constexpr auto | ShiftOrigin (WheelJointConf &, Length2) |
| | Shifts the origin notion of the given configuration.
|
| |
|
constexpr void | SetMaxMotorTorque (WheelJointConf &object, Torque value) noexcept |
| | Sets the maximum motor torque for the given configuration.
|
| |
|
constexpr void | SetFrequency (WheelJointConf &object, NonNegative< Frequency > value) noexcept |
| | Free function for setting the frequency of the given configuration.
|
| |
|
constexpr void | SetDampingRatio (WheelJointConf &object, Real value) noexcept |
| | Free function for setting the damping ratio of the given configuration.
|
| |
| BodyCounter | GetBodyRange (const World &world) noexcept |
| | Gets the extent of the currently valid body range. More...
|
| |
|
SizedRange< std::vector< BodyID >::const_iterator > | GetBodies (const World &world) noexcept |
| | Gets the bodies of the specified world.
|
| |
|
SizedRange< std::vector< BodyID >::const_iterator > | GetBodiesForProxies (const World &world) noexcept |
| | Gets the bodies-for-proxies range for the given world.
|
| |
| BodyID | CreateBody (World &world, const BodyConf &def=GetDefaultBodyConf()) |
| | Creates a rigid body with the given configuration. More...
|
| |
| const Body & | GetBody (const World &world, BodyID id) |
| | Gets the body configuration for the identified body. More...
|
| |
| void | SetBody (World &world, BodyID id, const Body &body) |
| | Sets the body state for the identified body. More...
|
| |
| void | Destroy (World &world, BodyID id) |
| | Destroys the identified body. More...
|
| |
| SizedRange< std::vector< FixtureID >::const_iterator > | GetFixtures (const World &world, BodyID id) |
| | Gets the range of all constant fixtures attached to the given body. More...
|
| |
| LinearAcceleration2 | GetLinearAcceleration (const World &world, BodyID id) |
| | Gets this body's linear acceleration. More...
|
| |
| AngularAcceleration | GetAngularAcceleration (const World &world, BodyID id) |
| | Gets this body's angular acceleration. More...
|
| |
| Acceleration | GetAcceleration (const World &world, BodyID id) |
| | Gets the acceleration of the identified body. More...
|
| |
| void | SetAcceleration (World &world, BodyID id, LinearAcceleration2 linear, AngularAcceleration angular) |
| | Sets the linear and rotational accelerations on the body. More...
|
| |
| void | SetAcceleration (World &world, BodyID id, LinearAcceleration2 value) |
| | Sets the linear accelerations on the body. More...
|
| |
| void | SetAcceleration (World &world, BodyID id, AngularAcceleration value) |
| | Sets the rotational accelerations on the body. More...
|
| |
| void | SetAcceleration (World &world, BodyID id, Acceleration value) |
| | Sets the accelerations on the given body. More...
|
| |
| void | SetTransformation (World &world, BodyID id, Transformation xfm) |
| | Sets the transformation of the body. More...
|
| |
| void | SetLocation (World &world, BodyID id, Length2 value) |
| | Sets the body's location. More...
|
| |
| void | SetAngle (World &world, BodyID id, Angle value) |
| | Sets the body's angular orientation. More...
|
| |
| void | RotateAboutWorldPoint (World &world, BodyID id, Angle amount, Length2 worldPoint) |
| | Rotates a body a given amount around a point in world coordinates. More...
|
| |
| void | RotateAboutLocalPoint (World &world, BodyID id, Angle amount, Length2 localPoint) |
| | Rotates a body a given amount around a point in body local coordinates. More...
|
| |
| Acceleration | CalcGravitationalAcceleration (const World &world, BodyID id) |
| | Calculates the gravitationally associated acceleration for the given body within its world. More...
|
| |
| BodyCounter | GetWorldIndex (const World &world, const BodyID id) noexcept |
| | Gets the world index for the given body. More...
|
| |
| BodyType | GetType (const World &world, BodyID id) |
| | Gets the type of the identified body. More...
|
| |
| void | SetType (World &world, BodyID id, BodyType value, bool resetMassData=true) |
| | Sets the type of the given body. More...
|
| |
| Transformation | GetTransformation (const World &world, BodyID id) |
| | Gets the body's transformation. More...
|
| |
| Angle | GetAngle (const World &world, BodyID id) |
| | Gets the angle of the identified body. More...
|
| |
| Velocity | GetVelocity (const World &world, BodyID id) |
| | Gets the velocity of the identified body. More...
|
| |
| void | SetVelocity (World &world, BodyID id, const Velocity &value) |
| | Sets the body's velocity (linear and angular velocity). More...
|
| |
| void | SetVelocity (World &world, BodyID id, const LinearVelocity2 &value) |
| | Sets the velocity of the identified body. More...
|
| |
| void | SetVelocity (World &world, BodyID id, AngularVelocity value) |
| | Sets the velocity of the identified body. More...
|
| |
| void | DestroyFixtures (World &world, BodyID id, bool resetMassData=true) |
| | Destroys fixtures of the identified body. More...
|
| |
| bool | IsEnabled (const World &world, BodyID id) |
| | Gets the enabled/disabled state of the body. More...
|
| |
| void | SetEnabled (World &world, BodyID id, bool value) |
| | Sets the enabled state of the body. More...
|
| |
| bool | IsAwake (const World &world, BodyID id) |
| | Gets the awake/asleep state of this body. More...
|
| |
| void | SetAwake (World &world, BodyID id) |
| | Wakes up the identified body. More...
|
| |
| void | UnsetAwake (World &world, BodyID id) |
| | Sleeps the identified body. More...
|
| |
| bool | IsMassDataDirty (const World &world, BodyID id) |
| | Gets whether the body's mass-data is dirty. More...
|
| |
| bool | IsFixedRotation (const World &world, BodyID id) |
| | Gets whether the body has fixed rotation. More...
|
| |
| void | SetFixedRotation (World &world, BodyID id, bool value) |
| | Sets this body to have fixed rotation. More...
|
| |
| Length2 | GetWorldCenter (const World &world, BodyID id) |
| | Get the world position of the center of mass of the specified body. More...
|
| |
| InvMass | GetInvMass (const World &world, BodyID id) |
| | Gets the inverse total mass of the body. More...
|
| |
| InvRotInertia | GetInvRotInertia (const World &world, BodyID id) |
| | Gets the inverse rotational inertia of the body. More...
|
| |
| Length2 | GetLocalCenter (const World &world, BodyID id) |
| | Gets the local position of the center of mass of the specified body. More...
|
| |
| MassData | ComputeMassData (const World &world, BodyID id) |
| | Computes the identified body's mass data. More...
|
| |
| void | SetMassData (World &world, BodyID id, const MassData &massData) |
| | Sets the mass properties to override the mass properties of the fixtures. More...
|
| |
| SizedRange< std::vector< std::pair< BodyID, JointID > >::const_iterator > | GetJoints (const World &world, BodyID id) |
| | Gets the range of all joints attached to the identified body. More...
|
| |
| bool | IsSpeedable (const World &world, BodyID id) |
| | Is identified body "speedable". More...
|
| |
| bool | IsAccelerable (const World &world, BodyID id) |
| | Is identified body "accelerable"? More...
|
| |
| bool | IsImpenetrable (const World &world, BodyID id) |
| | Is the body treated like a bullet for continuous collision detection? More...
|
| |
| void | SetImpenetrable (World &world, BodyID id) |
| | Sets the impenetrable status of the identified body. More...
|
| |
| void | UnsetImpenetrable (World &world, BodyID id) |
| | Unsets the impenetrable status of the identified body. More...
|
| |
| bool | IsSleepingAllowed (const World &world, BodyID id) |
| | Gets whether the identified body is allowed to sleep. More...
|
| |
| void | SetSleepingAllowed (World &world, BodyID, bool value) |
| | Sets whether the identified body is allowed to sleep. More...
|
| |
| Frequency | GetLinearDamping (const World &world, BodyID id) |
| | Gets the linear damping of the body. More...
|
| |
| void | SetLinearDamping (World &world, BodyID id, NonNegative< Frequency > linearDamping) |
| | Sets the linear damping of the body. More...
|
| |
| Frequency | GetAngularDamping (const World &world, BodyID id) |
| | Gets the angular damping of the body. More...
|
| |
| void | SetAngularDamping (World &world, BodyID id, NonNegative< Frequency > angularDamping) |
| | Sets the angular damping of the body. More...
|
| |
| SizedRange< std::vector< KeyedContactPtr >::const_iterator > | GetContacts (const World &world, BodyID id) |
| | Gets the container of all contacts attached to the identified body. More...
|
| |
| Force2 | GetCentripetalForce (const World &world, BodyID id, Length2 axis) |
| | Gets the centripetal force necessary to put the body into an orbit having the given radius. More...
|
| |
| void | ApplyForce (World &world, BodyID id, Force2 force, Length2 point) |
| | Apply a force at a world point. More...
|
| |
| void | ApplyTorque (World &world, BodyID id, Torque torque) |
| | Applies a torque. More...
|
| |
| void | ApplyLinearImpulse (World &world, BodyID id, Momentum2 impulse, Length2 point) |
| | Applies an impulse at a point. More...
|
| |
| void | ApplyAngularImpulse (World &world, BodyID id, AngularMomentum impulse) |
| | Applies an angular impulse. More...
|
| |
|
BodyCounter | GetAwakeCount (const World &world) noexcept |
| | Gets the count of awake bodies in the given world.
|
| |
| BodyCounter | Awaken (World &world) noexcept |
| | Awakens all of the bodies in the given world. More...
|
| |
|
void | SetAccelerations (World &world, Acceleration acceleration) noexcept |
| | Sets the accelerations of all the world's bodies to the given value.
|
| |
| void | SetAccelerations (World &world, LinearAcceleration2 acceleration) noexcept |
| | Sets the accelerations of all the world's bodies to the given value. More...
|
| |
|
BodyID | FindClosestBody (const World &world, Length2 location) noexcept |
| | Finds body in given world that's closest to the given location.
|
| |
| FixtureCounter | GetFixtureCount (const World &world, BodyID id) |
| | Gets the count of fixtures associated with the identified body. More...
|
| |
| void | SetTransform (World &world, BodyID id, Length2 location, Angle angle) |
| | Sets the position of the body's origin and rotation. More...
|
| |
| Length2 | GetLocation (const World &world, BodyID id) |
| | Convenience function for getting just the location of the identified body. More...
|
| |
| Length2 | GetWorldPoint (const World &world, BodyID id, const Length2 localPoint) |
| | Gets the world coordinates of a point given in coordinates relative to the body's origin. More...
|
| |
| UnitVec | GetLocalVector (const World &world, BodyID body, const UnitVec uv) |
| | Convenience function for getting the local vector of the identified body. More...
|
| |
| Length2 | GetLocalPoint (const World &world, BodyID body, const Length2 worldPoint) |
| | Gets a local point relative to the body's origin given a world point. More...
|
| |
|
Position | GetPosition (const World &world, BodyID id) |
| | Convenience function for getting the position of the identified body.
|
| |
|
UnitVec | GetWorldVector (const World &world, BodyID body, UnitVec localVector) |
| | Convenience function for getting a world vector of the identified body.
|
| |
| LinearVelocity2 | GetLinearVelocity (const World &world, BodyID id) |
| | Gets the linear velocity of the center of mass of the identified body. More...
|
| |
| AngularVelocity | GetAngularVelocity (const World &world, BodyID id) |
| | Gets the angular velocity. More...
|
| |
| bool | Awaken (World &world, BodyID id) |
| | Awakens the body if it's asleep. More...
|
| |
| Mass | GetMass (const World &world, BodyID id) |
| | Gets the mass of the body. More...
|
| |
| RotInertia | GetRotInertia (const World &world, BodyID id) |
| | Gets the rotational inertia of the body. More...
|
| |
| RotInertia | GetLocalRotInertia (const World &world, BodyID id) |
| | Gets the rotational inertia of the body about the local origin. More...
|
| |
| MassData | GetMassData (const World &world, BodyID id) |
| | Gets the mass data of the body. More...
|
| |
| void | ResetMassData (World &world, BodyID id) |
| | Resets the mass data properties. More...
|
| |
| void | SetImpenetrable (World &world, BodyID id, bool value) |
| | Convenience function that sets/unsets the impenetrable status of the identified body. More...
|
| |
| void | ApplyForceToCenter (World &world, BodyID id, Force2 force) |
| | Applies a force to the center of mass of the given body. More...
|
| |
| void | SetForce (World &world, BodyID id, Force2 force, Length2 point) noexcept |
| | Sets the given amount of force at the given point to the given body. More...
|
| |
| void | SetTorque (World &world, BodyID id, Torque torque) noexcept |
| | Sets the given amount of torque to the given body. More...
|
| |
| BodyCounter | GetBodyCount (const World &world) noexcept |
| | Gets the body count in the given world. More...
|
| |
| void | ClearForces (World &world) noexcept |
| | Clears forces. More...
|
| |
| template<class F > |
| void | SetAccelerations (World &world, F fn) |
| | Sets the accelerations of all the world's bodies. More...
|
| |
| constexpr WorldConf | GetDefaultWorldConf () noexcept |
| | Gets the default definitions value. More...
|
| |
| ContactCounter | GetContactRange (const World &world) noexcept |
| | Gets the extent of the currently valid contact range. More...
|
| |
|
SizedRange< std::vector< KeyedContactPtr >::const_iterator > | GetContacts (const World &world) noexcept |
| | Gets the contacts recognized within the given world.
|
| |
| const Contact & | GetContact (const World &world, ContactID id) |
| | Gets the identified contact. More...
|
| |
| void | SetContact (World &world, ContactID id, const Contact &value) |
| | Sets the identified contact's state. More...
|
| |
| bool | IsTouching (const World &world, ContactID id) |
| | Is this contact touching? More...
|
| |
| bool | IsAwake (const World &world, ContactID id) |
| | Gets the awake status of the specified contact. More...
|
| |
| void | SetAwake (World &world, ContactID id) |
| | Sets awake the bodies of the fixtures of the given contact. More...
|
| |
| ChildCounter | GetChildIndexA (const World &world, ContactID id) |
| | Get the child primitive index for fixture A. More...
|
| |
| ChildCounter | GetChildIndexB (const World &world, ContactID id) |
| | Get the child primitive index for fixture B. More...
|
| |
| FixtureID | GetFixtureA (const World &world, ContactID id) |
| | Gets fixture A of the identified contact. More...
|
| |
| FixtureID | GetFixtureB (const World &world, ContactID id) |
| | Gets fixture B of the identified contact. More...
|
| |
| BodyID | GetBodyA (const World &world, ContactID id) |
| | Gets the body-A of the identified contact if it has one. More...
|
| |
| BodyID | GetBodyB (const World &world, ContactID id) |
| | Gets the body-B of the identified contact if it has one. More...
|
| |
| TimestepIters | GetToiCount (const World &world, ContactID id) |
| | Gets the Time Of Impact (TOI) count. More...
|
| |
| bool | NeedsFiltering (const World &world, ContactID id) |
| | Whether or not the contact needs filtering. More...
|
| |
| bool | NeedsUpdating (const World &world, ContactID id) |
| | Whether or not the contact needs updating. More...
|
| |
| bool | HasValidToi (const World &world, ContactID id) |
| | Whether or not the contact has a valid TOI. More...
|
| |
| Real | GetToi (const World &world, ContactID id) |
| | Gets the time of impact (TOI) as a fraction. More...
|
| |
| Real | GetFriction (const World &world, ContactID id) |
| | Gets the friction used with the identified contact. More...
|
| |
| Real | GetRestitution (const World &world, ContactID id) |
| | Gets the restitution used with the identified contact. More...
|
| |
| void | SetFriction (World &world, ContactID id, Real friction) |
| | Sets the friction value for the identified contact. More...
|
| |
| void | SetRestitution (World &world, ContactID id, Real restitution) |
| | Sets the restitution value for the specified contact. More...
|
| |
| const Manifold & | GetManifold (const World &world, ContactID id) |
| | Gets the manifold for the identified contact. More...
|
| |
| LinearVelocity | GetTangentSpeed (const World &world, ContactID id) |
| | Gets the tangent speed of the identified contact. More...
|
| |
| void | SetTangentSpeed (World &world, ContactID id, LinearVelocity value) |
| | Sets the desired tangent speed for a conveyor belt behavior. More...
|
| |
| bool | IsEnabled (const World &world, ContactID id) |
| | Gets the enabled status of the identified contact. More...
|
| |
| void | SetEnabled (World &world, ContactID id) |
| | Sets the enabled status of the identified contact. More...
|
| |
| void | UnsetEnabled (World &world, ContactID id) |
| | Unsets the enabled status of the identified contact. More...
|
| |
| Real | GetDefaultFriction (const World &world, ContactID id) |
| | Gets the default friction amount for the identified contact. More...
|
| |
| Real | GetDefaultRestitution (const World &world, ContactID id) |
| | Gets the default restitution amount for the identified contact. More...
|
| |
| WorldManifold | GetWorldManifold (const World &world, ContactID id) |
| | Gets the world manifold for the identified contact. More...
|
| |
|
ContactCounter | GetTouchingCount (const World &world) noexcept |
| | Gets the touching count for the given world.
|
| |
| void | ResetFriction (World &world, ContactID id) |
| | Resets the friction mixture to the default value. More...
|
| |
| void | ResetRestitution (World &world, ContactID id) |
| | Resets the restitution to the default value. More...
|
| |
| void | SetEnabled (World &world, ContactID id, bool value) |
| | Convenience function for setting/unsetting the enabled status of the identified contact based on the value parameter. More...
|
| |
| ContactCounter | GetContactCount (const World &world) noexcept |
| | Gets the count of contacts in the given world. More...
|
| |
| FixtureCounter | GetFixtureRange (const World &world) noexcept |
| | Gets the extent of the currently valid fixture range. More...
|
| |
| FixtureCounter | GetFixtureCount (const World &world) noexcept |
| | Gets the count of fixtures in the given world. More...
|
| |
| FixtureID | CreateFixture (World &world, FixtureConf def=FixtureConf{}, bool resetMassData=true) |
| | Creates a fixture within the specified world. More...
|
| |
| FixtureID | CreateFixture (World &world, BodyID id, const Shape &shape, FixtureConf def=FixtureConf{}, bool resetMassData=true) |
| | Creates a fixture within the specified world. More...
|
| |
| bool | Destroy (World &world, FixtureID id, bool resetMassData=true) |
| | Destroys the identified fixture. More...
|
| |
| Filter | GetFilterData (const World &world, FixtureID id) |
| | Gets the filter data for the identified fixture. More...
|
| |
| void | SetFilterData (World &world, FixtureID id, const Filter &filter) |
| | Sets the contact filtering data. More...
|
| |
| BodyID | GetBody (const World &world, FixtureID id) |
| | Gets the identifier of the body associated with the identified fixture. More...
|
| |
| Transformation | GetTransformation (const World &world, FixtureID id) |
| | Gets the transformation associated with the given fixture. More...
|
| |
| const Shape & | GetShape (const World &world, FixtureID id) |
| | Gets the shape associated with the identified fixture. More...
|
| |
| bool | IsSensor (const World &world, FixtureID id) |
| | Is the specified fixture a sensor (non-solid)? More...
|
| |
| void | SetSensor (World &world, FixtureID id, bool value) |
| | Sets whether the fixture is a sensor or not. More...
|
| |
| AreaDensity | GetDensity (const World &world, FixtureID id) |
| | Gets the density of this fixture. More...
|
| |
| bool | TestPoint (const World &world, FixtureID id, Length2 p) |
| | Tests a point for containment in a fixture. More...
|
| |
| template<typename T > |
| FixtureID | CreateFixture (World &world, BodyID id, const T &shapeConf, FixtureConf def=FixtureConf{}, bool resetMassData=true) |
| | Creates a fixture within the specified world using a configuration of a shape. More...
|
| |
| Real | GetFriction (const World &world, FixtureID id) |
| | Gets the coefficient of friction of the specified fixture. More...
|
| |
| Real | GetRestitution (const World &world, FixtureID id) |
| | Gets the coefficient of restitution of the specified fixture. More...
|
| |
| MassData | GetMassData (const World &world, FixtureID id) |
| | Gets the mass data for the identified fixture in the given world. More...
|
| |
| BodyCounter | GetBodyRange (const WorldImpl &world) noexcept |
| | Gets the extent of the currently valid body range. More...
|
| |
|
BodyID | CreateBody (WorldImpl &world, const BodyConf &def=GetDefaultBodyConf()) |
| | Creates a body with the given configuration within the given world.
|
| |
| const Body & | GetBody (const WorldImpl &world, BodyID id) |
| | Gets the body configuration for the identified body. More...
|
| |
| void | SetBody (WorldImpl &world, BodyID id, const Body &value) |
| | Sets the body state for the identified body. More...
|
| |
|
void | Destroy (WorldImpl &world, BodyID id) |
| | Destroys the identified body.
|
| |
| SizedRange< std::vector< std::pair< BodyID, JointID > >::const_iterator > | GetJoints (const WorldImpl &world, BodyID id) |
| | Gets the range of all joints attached to this body. More...
|
| |
| SizedRange< WorldImpl::Fixtures::const_iterator > | GetFixtures (const WorldImpl &world, BodyID id) |
| | Gets the range of all constant fixtures attached to the given body. More...
|
| |
| SizedRange< std::vector< KeyedContactPtr >::const_iterator > | GetContacts (const WorldImpl &world, BodyID id) |
| | Gets the container of all contacts attached to this body. More...
|
| |
| ContactCounter | GetContactRange (const WorldImpl &world) noexcept |
| | Gets the extent of the currently valid contact range. More...
|
| |
| const Contact & | GetContact (const WorldImpl &world, ContactID id) |
| | Gets the identified contact. More...
|
| |
| void | SetContact (WorldImpl &world, ContactID id, const Contact &value) |
| | Sets the identified contact's state. More...
|
| |
|
const Manifold & | GetManifold (const WorldImpl &world, ContactID id) |
| | Gets the collision manifold for the identified contact.
|
| |
| FixtureCounter | GetFixtureRange (const WorldImpl &world) noexcept |
| | Gets the extent of the currently valid fixture range. More...
|
| |
| FixtureID | CreateFixture (WorldImpl &world, const FixtureConf &def) |
| | Creates a fixture per the given configuration. More...
|
| |
| const FixtureConf & | GetFixture (const WorldImpl &world, FixtureID id) |
| | Gets the identified fixture state. More...
|
| |
| void | SetFixture (WorldImpl &world, FixtureID id, const FixtureConf &value) |
| | Sets the identified fixture's state. More...
|
| |
| bool | Destroy (WorldImpl &world, FixtureID id) |
| | Destroys the identified fixture. More...
|
| |
|
const std::vector< ContactCounter > & | GetProxies (const WorldImpl &world, FixtureID id) |
| | Gets the dynamic tree leaves awaiting processing for the finding of new contacts.
|
| |
| ContactCounter | GetProxy (const WorldImpl &world, FixtureID id, ChildCounter child) |
| | Gets the specified proxy of the identified fixture. More...
|
| |
| ChildCounter | GetProxyCount (const WorldImpl &world, FixtureID id) |
| | Gets the count of proxies of the identified fixture. More...
|
| |
| JointCounter | GetJointRange (const WorldImpl &world) noexcept |
| | Gets the extent of the currently valid joint range. More...
|
| |
|
JointID | CreateJoint (WorldImpl &world, const Joint &def) |
| | Creates a new joint.
|
| |
|
void | Destroy (WorldImpl &world, JointID id) |
| | Destroys the identified joint.
|
| |
|
const Joint & | GetJoint (const WorldImpl &world, JointID id) |
| | Gets the identified joint's value.
|
| |
|
void | SetJoint (WorldImpl &world, JointID id, const Joint &def) |
| | Sets the identified joint's new value.
|
| |
|
std::unique_ptr< WorldImpl > | CreateWorldImpl (const WorldConf &def) |
| | Creates a new world with the given configuration.
|
| |
|
std::unique_ptr< WorldImpl > | CreateWorldImpl (const WorldImpl &other) |
| | Creates a new world that's a copy of the given world.
|
| |
|
void | Clear (WorldImpl &world) noexcept |
| | Clears the given world.
|
| |
|
void | SetFixtureDestructionListener (WorldImpl &world, std::function< void(FixtureID)> listener) noexcept |
| | Registers a destruction listener for fixtures.
|
| |
|
void | SetJointDestructionListener (WorldImpl &world, std::function< void(JointID)> listener) noexcept |
| | Registers a destruction listener for joints.
|
| |
|
void | SetBeginContactListener (WorldImpl &world, std::function< void(ContactID)> listener) noexcept |
| | Registers a begin contact event listener.
|
| |
|
void | SetEndContactListener (WorldImpl &world, std::function< void(ContactID)> listener) noexcept |
| | Registers an end contact event listener.
|
| |
|
void | SetPreSolveContactListener (WorldImpl &world, std::function< void(ContactID, const Manifold &)> listener) noexcept |
| | Registers a pre-solve contact event listener.
|
| |
|
void | SetPostSolveContactListener (WorldImpl &world, std::function< void(ContactID, const ContactImpulsesList &, unsigned)> listener) noexcept |
| | Registers a post-solve contact event listener.
|
| |
|
StepStats | Step (WorldImpl &world, const StepConf &conf) |
| | Steps the given world the specified amount.
|
| |
| void | ShiftOrigin (WorldImpl &world, Length2 newOrigin) |
| | Shifts the world origin. More...
|
| |
|
SizedRange< std::vector< BodyID >::const_iterator > | GetBodies (const WorldImpl &world) noexcept |
| | Gets the bodies of the specified world.
|
| |
| SizedRange< std::vector< BodyID >::const_iterator > | GetBodiesForProxies (const WorldImpl &world) noexcept |
| | Gets the bodies-for-proxies range for this world. More...
|
| |
|
SizedRange< std::vector< JointID >::const_iterator > | GetJoints (const WorldImpl &world) noexcept |
| | Gets the joints of the specified world.
|
| |
|
SizedRange< std::vector< KeyedContactPtr >::const_iterator > | GetContacts (const WorldImpl &world) noexcept |
| | Gets the contacts of the specified world.
|
| |
|
bool | IsLocked (const WorldImpl &world) noexcept |
| | Is the world locked (in the middle of a time step).
|
| |
| bool | IsStepComplete (const WorldImpl &world) noexcept |
| | Whether or not "step" is complete. More...
|
| |
| bool | GetSubStepping (const WorldImpl &world) noexcept |
| | Gets whether or not sub-stepping is enabled. More...
|
| |
| void | SetSubStepping (WorldImpl &world, bool value) noexcept |
| | Enables/disables single stepped continuous physics. More...
|
| |
|
Length | GetMinVertexRadius (const WorldImpl &world) noexcept |
| | Gets the minimum vertex radius that shapes in this world can be.
|
| |
|
Length | GetMaxVertexRadius (const WorldImpl &world) noexcept |
| | Gets the maximum vertex radius that shapes in this world can be.
|
| |
| Frequency | GetInvDeltaTime (const WorldImpl &world) noexcept |
| | Gets the inverse delta time. More...
|
| |
|
const DynamicTree & | GetTree (const WorldImpl &world) noexcept |
| | Gets access to the broad-phase dynamic tree information.
|
| |
| SizedRange< std::vector< FixtureID >::const_iterator > | GetFixturesForProxies (const WorldImpl &world) noexcept |
| | Gets the fixtures-for-proxies range for this world. More...
|
| |
| JointCounter | GetJointRange (const World &world) noexcept |
| | Gets the extent of the currently valid joint range. More...
|
| |
|
SizedRange< std::vector< JointID >::const_iterator > | GetJoints (const World &world) noexcept |
| | Gets the joints of the specified world.
|
| |
|
JointID | CreateJoint (World &world, const Joint &def) |
| | Creates a new joint within the given world.
|
| |
| void | Destroy (World &world, JointID id) |
| | Destroys the identified joint. More...
|
| |
| const Joint & | GetJoint (const World &world, JointID id) |
| | Gets the value of the identified joint. More...
|
| |
| void | SetJoint (World &world, JointID id, const Joint &def) |
| | Sets the value of the identified joint. More...
|
| |
| TypeID | GetType (const World &world, JointID id) |
| | Gets the type of the joint. More...
|
| |
| bool | GetCollideConnected (const World &world, JointID id) |
| | Gets collide connected for the specified joint. More...
|
| |
| BodyID | GetBodyA (const World &world, JointID id) |
| | Gets the identifier of body-A of the identified joint. More...
|
| |
| BodyID | GetBodyB (const World &world, JointID id) |
| | Gets the identifier of body-B of the identified joint. More...
|
| |
| Length2 | GetLocalAnchorA (const World &world, JointID id) |
| | Get the anchor point on body-A in local coordinates. More...
|
| |
| Length2 | GetLocalAnchorB (const World &world, JointID id) |
| | Get the anchor point on body-B in local coordinates. More...
|
| |
| Momentum2 | GetLinearReaction (const World &world, JointID id) |
| | Gets the linear reaction on body-B at the joint anchor. More...
|
| |
| AngularMomentum | GetAngularReaction (const World &world, JointID id) |
| | Get the angular reaction on body-B for the identified joint. More...
|
| |
| Angle | GetReferenceAngle (const World &world, JointID id) |
| | Gets the reference-angle property of the identified joint if it has it. More...
|
| |
| void | SetAwake (World &world, JointID id) |
| | Wakes up the joined bodies. More...
|
| |
| UnitVec | GetLocalXAxisA (const World &world, JointID id) |
| | Gets the local-X-axis-A property of the identified joint if it has it. More...
|
| |
| UnitVec | GetLocalYAxisA (const World &world, JointID id) |
| | Gets the local-Y-axis-A property of the identified joint if it has it. More...
|
| |
| AngularVelocity | GetMotorSpeed (const World &world, JointID id) |
| | Gets the motor-speed property of the identied joint if it supports it. More...
|
| |
| void | SetMotorSpeed (World &world, JointID id, AngularVelocity value) |
| | Sets the motor-speed property of the identied joint if it supports it. More...
|
| |
| AngularMomentum | GetAngularMotorImpulse (const World &world, JointID id) |
| | Gets the angular motor impulse of the identified joint if it has this property. More...
|
| |
| RotInertia | GetAngularMass (const World &world, JointID id) |
| | Gets the computed angular rotational inertia used by the joint. More...
|
| |
| Torque | GetMaxMotorTorque (const World &world, JointID id) |
| | Gets the max motor torque. More...
|
| |
| void | SetMaxMotorTorque (World &world, JointID id, Torque value) |
| | Sets the maximum motor torque. More...
|
| |
| Frequency | GetFrequency (const World &world, JointID id) |
| | Gets the frequency of the identified joint if it has this property. More...
|
| |
| void | SetFrequency (World &world, JointID id, Frequency value) |
| | Sets the frequency of the identified joint if it has this property. More...
|
| |
| AngularVelocity | GetAngularVelocity (const World &world, JointID id) |
| | Gets the angular velocity of the identified joint if it has this property. More...
|
| |
| bool | IsEnabled (const World &world, JointID id) |
| | Gets the enabled/disabled state of the joint. More...
|
| |
| JointCounter | GetWorldIndex (const World &world, JointID id) noexcept |
| | Gets the world index of the given joint. More...
|
| |
| Length2 | GetAnchorA (const World &world, JointID id) |
| | Get the anchor point on body-A in world coordinates. More...
|
| |
| Length2 | GetAnchorB (const World &world, JointID id) |
| | Get the anchor point on body-B in world coordinates. More...
|
| |
| Real | GetRatio (const World &world, JointID id) |
| | Gets the ratio property of the identified joint if it has it. More...
|
| |
| Length | GetJointTranslation (const World &world, JointID id) |
| | Gets the current joint translation. More...
|
| |
| Angle | GetAngle (const World &world, JointID id) |
| | Gets the angle property of the identified joint if it has it. More...
|
| |
| bool | IsLimitEnabled (const World &world, JointID id) |
| | Gets whether the identified joint's limit is enabled. More...
|
| |
| void | EnableLimit (World &world, JointID id, bool value) |
| | Sets whether the identified joint's limit is enabled or not. More...
|
| |
| bool | IsMotorEnabled (const World &world, JointID id) |
| | Is the joint motor enabled? More...
|
| |
| void | EnableMotor (World &world, JointID id, bool value) |
| | Enable/disable the joint motor. More...
|
| |
| Momentum | GetLinearMotorImpulse (const World &world, JointID id) |
| | Gets the linear motor impulse of the identified joint if it supports that. More...
|
| |
| Length2 | GetLinearOffset (const World &world, JointID id) |
| | Gets the target linear offset, in frame A. More...
|
| |
| void | SetLinearOffset (World &world, JointID id, Length2 value) |
| | Sets the target linear offset, in frame A. More...
|
| |
| Angle | GetAngularOffset (const World &world, JointID id) |
| | Gets the target angular offset. More...
|
| |
| void | SetAngularOffset (World &world, JointID id, Angle value) |
| | Sets the target angular offset. More...
|
| |
| Length2 | GetGroundAnchorA (const World &world, JointID id) |
| | Get the first ground anchor. More...
|
| |
| Length2 | GetGroundAnchorB (const World &world, JointID id) |
| | Get the second ground anchor. More...
|
| |
| Length | GetCurrentLengthA (const World &world, JointID id) |
| | Get the current length of the segment attached to body-A. More...
|
| |
| Length | GetCurrentLengthB (const World &world, JointID id) |
| | Get the current length of the segment attached to body-B. More...
|
| |
| Length2 | GetTarget (const World &world, JointID id) |
| | Gets the target point. More...
|
| |
| void | SetTarget (World &world, JointID id, Length2 value) |
| | Sets the target point. More...
|
| |
| Angle | GetAngularLowerLimit (const World &world, JointID id) |
| | Get the lower joint limit. More...
|
| |
| Angle | GetAngularUpperLimit (const World &world, JointID id) |
| | Get the upper joint limit. More...
|
| |
| void | SetAngularLimits (World &world, JointID id, Angle lower, Angle upper) |
| | Set the joint limits. More...
|
| |
| bool | ShiftOrigin (World &world, JointID id, Length2 value) |
| | Shifts the origin of the identified joint. More...
|
| |
| Real | GetDampingRatio (const World &world, JointID id) |
| | Gets the damping ratio associated with the identified joint if it has one. More...
|
| |
| Length | GetLength (const World &world, JointID id) |
| | Gets the length associated with the identified joint if it has one. More...
|
| |
| LimitState | GetLimitState (const World &world, JointID id) |
| | Gets the joint's limit state if it has one. More...
|
| |
| template<typename T > |
| JointID | CreateJoint (World &world, const T &value) |
| | Creates a new joint from a configuration. More...
|
| |
| template<typename T > |
| void | SetJoint (World &world, JointID id, const T &value) |
| | Sets a joint's value from a configuration. More...
|
| |
| Force | GetMotorForce (const World &world, JointID id, Frequency inv_dt) |
| | Gets the current motor force for the given joint, given the inverse time step. More...
|
| |
| Torque | GetMotorTorque (const World &world, JointID id, Frequency inv_dt) |
| | Gets the current motor torque for the given joint given the inverse time step. More...
|
| |
| JointCounter | GetJointCount (const World &world) noexcept |
| | Gets the count of joints in the given world. More...
|
| |
|
void | SetFixtureDestructionListener (World &world, std::function< void(FixtureID)> listener) noexcept |
| | Sets the fixture destruction lister.
|
| |
|
void | SetJointDestructionListener (World &world, std::function< void(JointID)> listener) noexcept |
| | Sets the joint destruction lister.
|
| |
|
void | SetBeginContactListener (World &world, std::function< void(ContactID)> listener) noexcept |
| | Sets the begin-contact lister.
|
| |
|
void | SetEndContactListener (World &world, std::function< void(ContactID)> listener) noexcept |
| | Sets the end-contact lister.
|
| |
|
void | SetPreSolveContactListener (World &world, std::function< void(ContactID, const Manifold &)> listener) noexcept |
| | Sets the pre-solve-contact lister.
|
| |
|
void | SetPostSolveContactListener (World &world, std::function< void(ContactID, const ContactImpulsesList &, unsigned)> listener) noexcept |
| | Sets the post-solve-contact lister.
|
| |
| void | Clear (World &world) noexcept |
| | Clears this world. More...
|
| |
|
Length | GetMinVertexRadius (const World &world) noexcept |
| | Gets the min vertex radius that shapes for the given world are allowed to be.
|
| |
|
Length | GetMaxVertexRadius (const World &world) noexcept |
| | Gets the max vertex radius that shapes for the given world are allowed to be.
|
| |
|
StepStats | Step (World &world, const StepConf &conf=StepConf{}) |
| | Steps the given world the specified amount.
|
| |
| StepStats | Step (World &world, Time delta, TimestepIters velocityIterations=8, TimestepIters positionIterations=3) |
| | Steps the world ahead by a given time amount. More...
|
| |
| bool | GetSubStepping (const World &world) noexcept |
| | Gets whether or not sub-stepping is enabled. More...
|
| |
| void | SetSubStepping (World &world, bool flag) noexcept |
| | Enables/disables single stepped continuous physics. More...
|
| |
|
const DynamicTree & | GetTree (const World &world) noexcept |
| | Gets the dynamic tree of the given world.
|
| |
|
FixtureCounter | GetShapeCount (const World &world) noexcept |
| | Gets the count of unique shapes in the given world.
|
| |
| void | ShiftOrigin (World &world, Length2 newOrigin) |
| | Shifts the world origin. More...
|
| |